I februar 2024 ble det gjennomført et testtokt med G.O. Sars i Sognefjorden hvor det ble samlet inn data både ved hjelp av robotikk og standard prøvetakning. Formålet med toktet var å 1) vurdere datatyper og kvalitet på data hentet inn ved hjelp av robotikk, og å vurdere hva vi mister/får når vi samler inn data ved hjelp av selvgående fartøy sammenlignet med innsamling ved forskningsfartøy, og 2) evaluere hvor nyttig prøvetakning ved selvgående fartøy er. På toktet kjørte vi tre glidere fra to ulike leverandører, og testet en vertikalt profilerende CTD drone. Vi samlet også inn data med CTD, håver og multinett kjørt fra forskningsfartøyet. Resultatene fra toktet viser at datainnsamling med glidere er lovende, men det er utfordringer knyttet til å implementere dette for raskt i overvåkningsaktiviteten dersom formålet er å redusere bruken av forskningsfartøy. Utfordringene er knyttet til oppbygging av kompetanse på institusjonen, men også med funksjonaliteten og bruken av gliderne. Lekkasjer er en bekymring, og ulike glidertyper passer best i ulike miljø. Den relativt små og enkle Hefringglideren håndterte den sterke strømmen i fjorden best, men den lille størrelsen er en begrensning for muligheten til å integrere flere og større sensorer. Slike sensorer kan integreres i den større Slocumglideren, men det påvirker manøvreringsevnen og hvor robust glideren er. Videre arbeid inkluderer å teste styrbarhet også i åpent hav, og utarbeide rutiner for utsetting og opptak av glidere med mindre fartøy nær kysten. Dette er nødvendig for å frigjøre forskningsfartøyene fra gliderutsetting og opptak. Videre arbeid inkluderer også å få mer erfaring med lengre gliderutsettinger og å utvikle dataprosesseringsrutiner og løyper.
Report from the new technology testing cruise in Sognefjorden in February 2024
Report series:
Toktrapport 2025-4
ISSN: 1503-6294
Published: 28.01.2025
Cruise no.: 2024001003
Project No.: 15977-06
On request by: Havforskningsinstituttet
Research group(s):
Oseanografi og klima
Program:
Barentshavet og Polhavet,
Norskehavet,
Nordsjøen
Approved by:
Research Director(s):
Geir Huse
Program leader(s):
Bjørn Erik Axelsen
Norsk sammendrag
Summary
During a five days survey with G.O. Sars in February 2024, we simultaneously collected data with marine robotics and standard sampling. The main goals of the test survey were to 1) assess data types and quality of data when sampling with robotics and evaluate what we gain/loose when using autonomous sampling as compared to standard sampling from a vessel, and 2) evaluate the suitability of autonomous sampling. During the survey we ran three gliders from two manufacturers and with diverging sensors. In addition, we deployed and recovered a vertically profiling CTD-drone. We also collected in situ data with CTD, nets and Multinet. The results show that gliders indeed are promising, but there are challenges associated with a rapid implementation of gliders in the monitoring program with the aim of reducing the ordinary surveys with research vessels. These challenges include build-up of institutional competence on the new technology, but also the functionality/ease of use of the gliders. Glider leakages are a concern. Different glider types work better for different applications. The small simple Hefring Oceanscout dealt a lot better with the strong currents in the fjord, but its small size also prevents integration of larger sensors. These can be integrated in the larger Slocum glider, but they affect the efficiency of the glider behaviour and robustness. Further work includes testing mobility offshore and developing routines for deployment/recovery of gliders using smaller boats close to the coast, as this would prevent use of research vessels for glider activity. Further work also includes building more experience with using gliders during longer missions. The short data sets from the fjord deployments also highlight the need to develop data processing routines and tools, largely based on existing correction and processing protocols.
1 - Introduction
Institute of Marine Research (IMR) has several standard sections where oceanography, nutrients, ocean acidification, phytoplankton, and zooplankton are sampled by research vessels several times per year. As part of the project New Monitoring Methodology (NEMO), IMR are now assessing the possibilities of replacing some of the sampling at the standard sections with autonomous marine robotics.
During a five days survey with G.O. Sars (February 17th-21st 2024), we simultaneously collected data with marine robotics and standard sampling. The main goals of the test survey were to 1) assess data types and quality of data when sampling a standard section with robotics and evaluate what we gain/loose when using autonomous sampling as compared to standard sampling from a vessel, and 2) evaluate the suitability of autonomous sampling at standard (offshore) sections.
During the survey we ran three gliders from two manufacturers and with diverging sensors. In addition, we deployed and recovered a vertically profiling CTD-drone (Syrenna Waterdrone). We also intended to tow an underwater vehicle (MESSOR), but trouble with the winch hindered this.
Time period and area/Activity
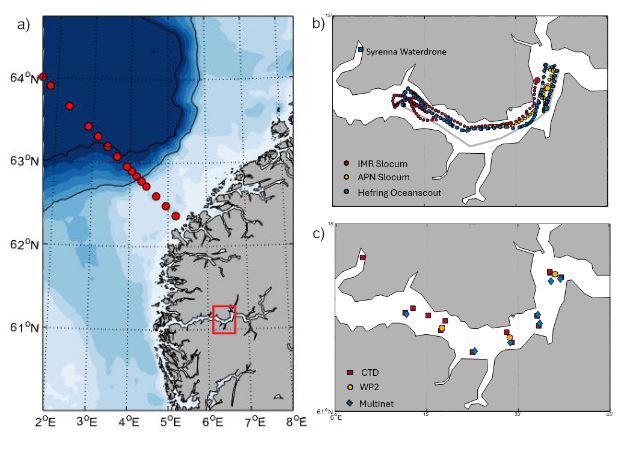
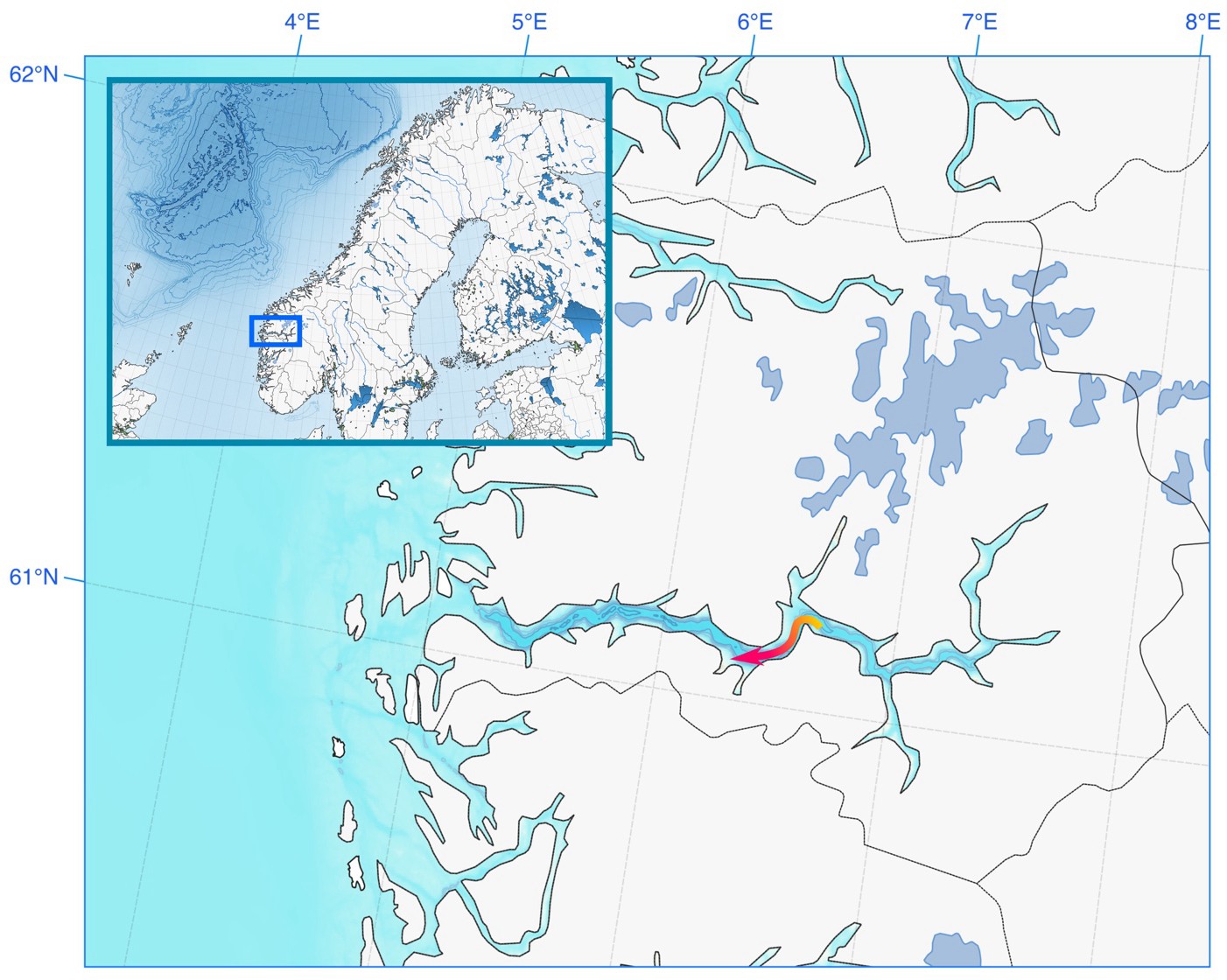
The survey started on February 17, 2024, in Bergen. The preferred survey area, the inner part of the Svinøy section in the Norwegian Sea, was rejected on departure due to the weather forecast showing periods with high winds and waves which would make deployment and recovery of the gear difficult. An alternative survey area was identified in the inner part of Sognefjorden, between Høyanger and Balestrand (Figure 1a). The motivation for choosing this part of the fjord was due to its depth (larger than 1000 m) which would be beneficial for towing MESSOR, and the absence of aquaculture and ferries which the gliders could collide with.
The scientific activity started off with deploying a profiling CTD-drone (Syrenna Waterdrone) in the western part of the study area (Figure 1b). Thereafter three gliders were deployed in the inner/eastern part of the study area, all of them missioned to follow the same track (Figure 1b). CTD and net sampling, for comparison with the glider data, were conducted while the gliders were traveling along the track (Figure 1c). Sampling was performed both along the glider track, and across the fjord to capture horizontal differences within the fjord which might be of importance when comparing the data sets. An acoustic survey of the study area, collecting data with the vessel mounted ADCP, was conducted at the end.
Scientific crew for the survey included Randi B. Ingvaldsen (IMR), Karen Assmann (IMR), Martin Dahl (IMR), Jean-Baptiste Danrè (IMR), Benjamin Marum (IMR), Webjørn Melle (IMR), Jane Strømstad Møgster (IMR), Hege Skaar (IMR), Jan Erik Stiansen (IMR), Alex Alcocer (Syrenna), Moustafa Elkolali (Syrenna), Håvard Buschmann (Akvaplan-Niva), and Matt Scheuer (Hefring Engineering).
2 - Methods
2.1 - Drones description
2.1.1 - Slocum from IMR
The IMR glider “Frigg” is a Slocum G3 glider with a shallow pump allowing it to dive to a depth of 200 m and a ballast pump volume of 1000 cc to deal with large currents and density gradients in coastal areas. Note that “standard” Slocum G3 gliders can dive to 1000 m and have a ballast pump volume of 800 cc. “Frigg" has rechargeable lithium batteries with a capacity of 235 Ah. The glider is equipped with the following sensors:
• RBRlegato CTD
• Conductivity (Salinity), Temperature, Depth
• Sea-Bird ECO Triplet
• Rhodamine, uranine, CDOM and chlorophyll
• Sea-Bird Deep SUNA Ocean Nitrate Sensor
• Nitrate
Both the RBR legato CTD and the ECO Triplet are integrated in the bottom of the science bay and the SUNA nitrate sensor is mounted forward on top of the glider. Sensors measured both downcast and upcast, with one measurement every second.
For this deployment the glider was piloted by Jean-Baptiste Danré and Karen Assmann from G.O. Sars through Teledyne Webb’s web-based Slocum Fleet Mission Control (SFMC) system. During deployment we communicated with the glider using a FreeWave radio for efficient communication. As the glider left the line of sight of the ship during the rest of the deployment we switched to Iridium. Position data and a subset of the engineering and science data was sent at each surfacing of the glider through Iridium in the interest of keeping surface times short and Iridium costs reasonable. The remaining part of data was downloaded with a cable after the glider had been recovered.
2.1.2 - Slocum from Akvaplan-Niva
Slocum G3 with extension module fitted with:
-
Jasco Observer with a M36-V35-100 Hydrophone
-
An internal recording unit in the science-bay with a SubConn bulkhead to the hydrophone
-
-
Hydroptic UVP6-LP
-
An underwater vision profiler designed to study large (>100 µm) particles and zooplankton. 5MP camera and 0.65L of sampling volume.
-
-
RBRlegato CTD
-
Conductivity, Salinity, Temperature,
-
-
Sea-Bird ECO Triplet
-
rhodamine, uranine, CDOM and chlorophyll
-
-
Aanderaa oxygen optode 4831W
-
Oxygen, temperature
-
The Slocum glider is controlled and piloted by using Teledyne’s SFMC through free wave (Line of sight) or through a satellite-based broadband, iridium. Communications with the glider is done by text-based commands or files although scripts can be used to automate the process. The Slocum glider has one ballast pump in the front with 1000cc capacity to change the glider’s buoyancy. It then moves the forward battery to change center of mass to pitch. On surface it uses an additional rear air pump 1400cc to lift the antenna out of the water. In case of emergencies the Slocum glider also has an ejection-weight (500g).
Akvaplan-Niva's Slocum uses rechargeable li-ion batteries, reducing long term cost of operations, but shortens operating time. For this deployment the glider has been piloted by a mix of Cyprus Subsea Consulting & Services, Håvard Buschmann and Ehsan Abdi.
Position data and a subset of the engineering and science data was sent at each surfacing of the glider through Iridium. This included UVP6 data grouped into classes using the standard model from Hydroptics. The remaining part of data was downloaded with a cable after the glider had been recovered.
2.1.3 - Hefring Oceanscout
The demo Oceanscout glider, internally referred to as “Gimli”, was built in 2022 and has been used extensively for internal testing and external demo purposes. The system is equipped with a JFE-Advantech CT sensor and a Keller pressure sensor to record CTD data. Data is stored for every 0.5 m in the top 10 m of the water column and every 5 m in the interval 10-200 m.
The glider’s operation is controlled by cloud-based mission software running on ASW and by firmware running on processors that are internal to the glider. The mission planning consists of a series of waypoints, depth profiles, number of Yos between surfacing, etc. and resides with the cloud-based software, as does the user display and map functions. The firmware is responsible for all robotic control, including the calculation of the depth average currents, estimation of the adjusted dive direction, automatic control of the descent/ascent speed, roll adjustments, etc. The cloud-based software allows the user to send individual commands to the glider, but the glider is in principle completely autonomous when the mission has been set. Most importantly, this means that there is no need to supervise the glider once a satisfactory configuration is established.
2.1.4 - Syrenna Waterdrone
Syrenna Waterdrone is a buoyancy driven moored vertical profiler which allows to obtain persistent long term data series from fixed locations. The profiler communicates via Iridium and 4G LTE while on the surface and provides almost real time access to the acquired sensor data via a cloud platform. The Waterdrone employed in the tests was equipped with a RBR Concerto CDT and fast dissolved oxygen sensor. The Waterdrone had an instrument failure during the deployment and did not return data.
2.2 - Other platforms description
2.2.1 - CTD
Temperature and salinity were measured on all stations using a Seabird 911plus CTD (20 casts) with water carousel sampler (Figure 1c and Table 1). The CTD was lowered to ~5 m above seafloor, and samples for salinity calibration were taken at every station before up-cast started. The CTD also had a Chelsea Aqua 3 Chl Con fluorescence sensor (calibrated last on 3 February 2012) and a SBE 43 oxygen sensor (calibrated last on 10 March 2022).
2.2.2 - ADCP
Observations of ocean currents were obtained from the vessel mounted RDI 75 kHz Acoustic Doppler Current Profiler (ADCP). The ADCP was only used occasionally, due to interference with the Simard EK80 when the latter is run in broadband mode. However, at the end of the survey, the survey area was covered by acoustic zig-zag courses to obtain an overview of the actual ocean currents at that time. Post-processing of ADCP data was performed using the Common Oceanographic Data Access System (Firing et al., 1995). The uppermost ADCP bin was centered at 28 m depth, meaning that near surface currents were not captured. Tides were not removed from the processed data set.
Table 1. CTD and nets sampled during the survey.
|
Station type |
Station number |
Date |
Latitude (oN) |
Longitude (oE) |
|
CTD |
147 |
17.02.2024 |
61.2051 |
6.0732 |
|
CTD with water sample |
148 |
18.02.2024 |
61.1209 |
6.3004 |
|
CTD with water sample |
149 |
18.02.2024 |
61.1114 |
6.2916 |
|
WP2 |
149 |
18.02.2024 |
61.1114 |
6.2916 |
|
CTD with water sample |
150 |
18.02.2024 |
61.1082 |
6.2880 |
|
CTD with water sample |
151 |
18.02.2024 |
61.1058 |
6.4686 |
|
CTD with water sample |
152 |
18.02.2024 |
61.0987 |
6.4766 |
|
WP2 |
152 |
18.02.2024 |
61.0986 |
6.4765 |
|
CTD |
153 |
18.02.2024 |
61.1848 |
6.5877 |
|
CTD with water sample |
154 |
18.02.2024 |
61.0920 |
6.4827 |
|
Multinet Mammoth |
154 |
18.02.2024 |
61.0922 |
6.4784 |
|
Multinet Mammoth |
155 |
18.02.2024 |
61.1300 |
6.1942 |
|
CTD with water sample |
155 |
19.02.2024 |
61.1316 |
6.1906 |
|
CTD with water sample |
156 |
19.02.2024 |
61.0791 |
6.3750 |
|
Multinet Mammoth |
156 |
19.02.2024 |
61.0805 |
6.3810 |
|
CTD with water sample |
157 |
19.02.2024 |
61.1142 |
6.5563 |
|
Multinet Mammoth |
157 |
19.02.2024 |
61.1174 |
6.5589 |
|
CTD with water sample |
158 |
19.02.2024 |
61.1864 |
6.5866 |
|
CTD with water sample |
159 |
19.02.2024 |
61.1830 |
6.6014 |
|
WP2 |
159 |
19.02.2024 |
61.1830 |
6.6014 |
|
Multinet Mammoth |
159 |
19.02.2024 |
61.1738 |
6.5902 |
|
CTD with water sample |
160 |
19.02.2024 |
61.1790 |
6.6184 |
|
Multinet Mammoth |
160 |
20.02.2024 |
61.1769 |
6.6159 |
|
CTD with water sample |
161 |
20.02.2024 |
61.1377 |
6.2118 |
|
CTD with water sample |
162 |
20.02.2024 |
61.1275 |
6.5517 |
|
Multinet Mammoth |
162 |
20.02.2024 |
61.1290 |
6.5538 |
|
CTD with water sample |
163 |
20.02.2024 |
61.1281 |
6.2536 |
|
CTD with water sample |
164 |
20.02.2024 |
61.1067 |
6.4925 |
|
CTD with water sample |
165 |
21.02.2024 |
61.0459 |
5.4116 |
|
CTD |
166 |
21.02.2024 |
61.0852 |
5.0489 |
2.2.3 - Water sampling
At most CTD stations, waters samples were collected from specific depth, using 5 L Niskin water bottles on the CTD-carousel sampler. Samples for chlorophyll were taken from the upper 100 m, and samples for nutrients were taken at standard depths. Samples for nutrients were preserved with chloroform and stored in refrigerator. The samples will be analyzed at the chemistry laboratory at IMR after the cruise. The water samples will be analyzed for nitrite, nitrate, phosphate and silicate.
2.2.4 - Net sampling
A total of 3 and 7 sampling stations with WP2 and Multinet Mammoth, respectively, were conducted (Figure 1c and Table 1). The Institute of Marine Research (IMR) version of WP2 (0.25 m2 mouth opening and 180 µm meshes) was hauled vertically from 200m depth to the surface. The Multinet Mammoth equipped with 9 nets with 180 µm meshes was hauled obliquely from the surface to 700 m and back to the surface. The ship speed was 1.8 knots, and the net was lowered and heaved at 0.5 m/s. Net number 1 was kept open from the surface to 700 m to stabilize the gear. Nets number 2-8 were opened and closed at standard IMR depths from 700 m to the surface (700-500, 500-400, 400-300, 300-200, 200-100, 100-50, 50-25, 25-0 m). These are the standard depths of the Norwegian Sea standard section sampling.
In the laboratory on deck the samples were treated according to the IMR standard sample work up. Samples were split in two, one half was fixed in 4% formalin and the other half was used for dry weight measurements. For dry weight estimation the samples were sieved at 180, 1000 and 2000 µm. From the 2000 µm fraction organisms were identified, counted, and put on aluminum trays according to the IMR species list. The rest at 2000 µm and the other two size fractions were put on aluminum trays and dried at 65° C for at least 24 hours. After that dry weight samples were frozen and will be dried again and weighed at IMR.
2.2.5 - MESSOR
The MESSOR is a towed platform (max depth=1000m, towing speed 5 knots), with F-CTD (Seabird), light spectrum sensors, Optical Plankton Counter (OPC), Digital autonomous Video Plankton Recorder (DA VPR), Real time Video Plankton Recorder (RT VPR), and Simrad EK80 (38, 70, 120, 200, 333 kHz). The ship’s own winch with optical fiber and electrical cable wire was still at service. Therefore, a replacement winch (Fiber winch 3) was brought onboard after having gone through a service on the hydraulic engine and the slip-ring. It turned out that the signal loss over the total length of the fiber including connections was too large to allow signals from the optical sensors to be delivered to the main computer on deck. It was made clear that the sensors worked on deck when directly connected to the main computer. Further, the winch did not have the necessary power to be used for towing the MESSOR. Therefore, we were not able to use the MESSOR and we could not get in situ samples with the VPR (Video Plankton Recorder) for comparison with the UVP 6 (Underwater Video Profiler) on the Slocum glider from Akvaplan-Niva.
2.2.6 - Echo sounder
Acoustical data were obtained from a vessel mounted Simrad EK80 (38, 70, 120, 200, 333 kHz). The plan was to compare the vessel mounted EK80 data with similar data from the MESSOR, but this cannot be done since the MESSOR winch did not work. The EK80 data will thus not be scrutinized.
2.3 - Modelling
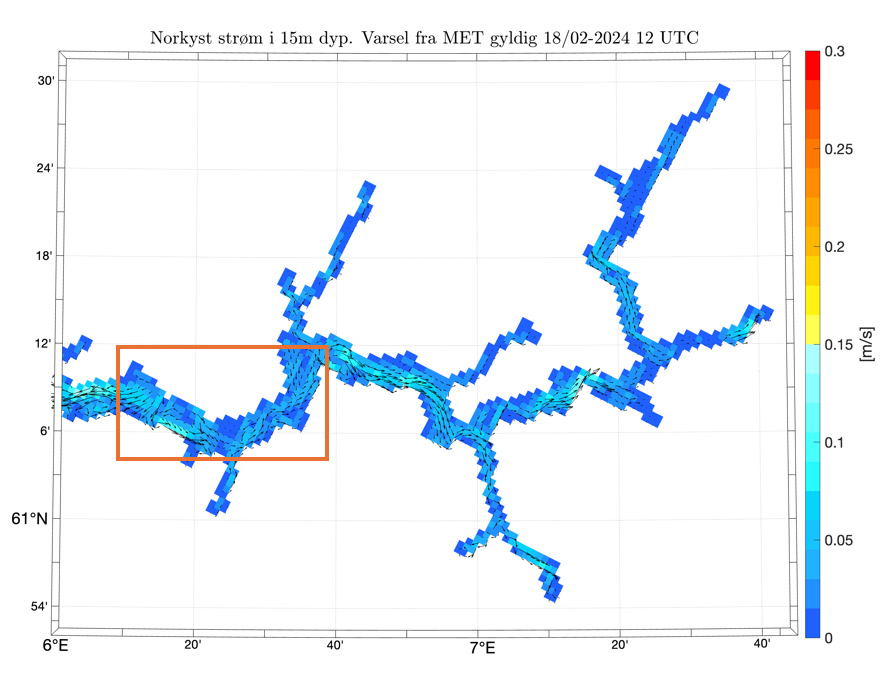
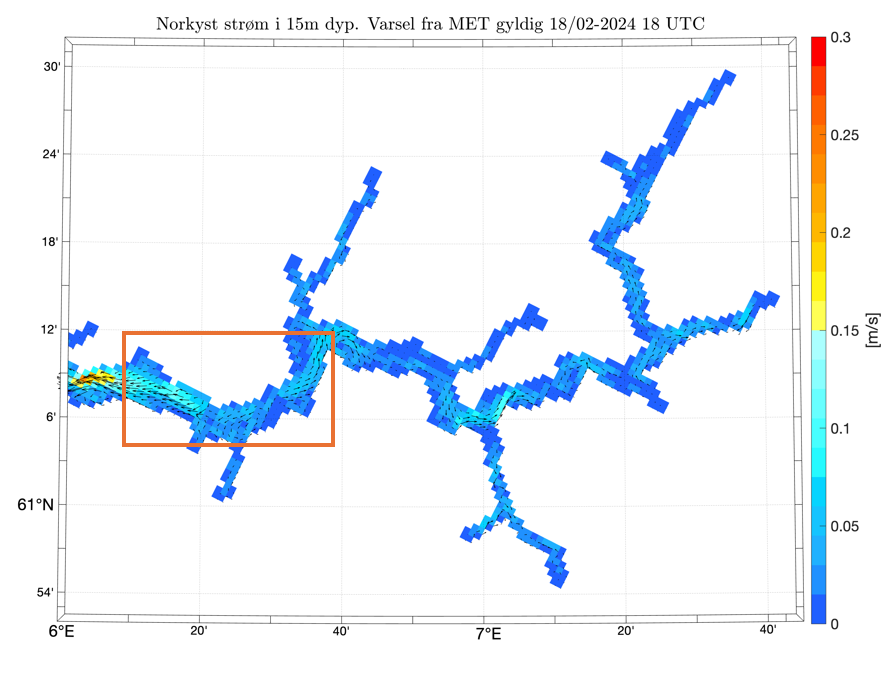
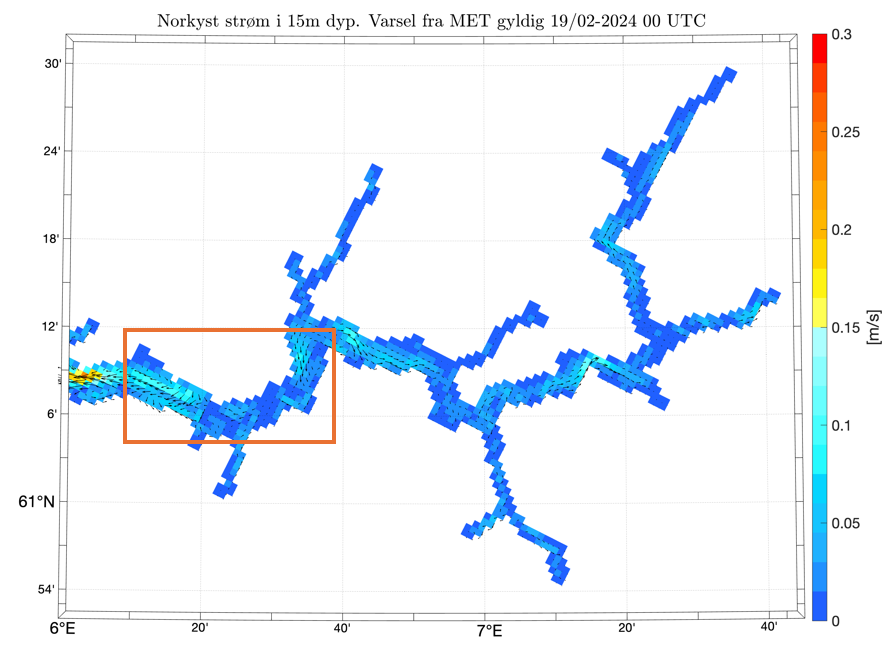
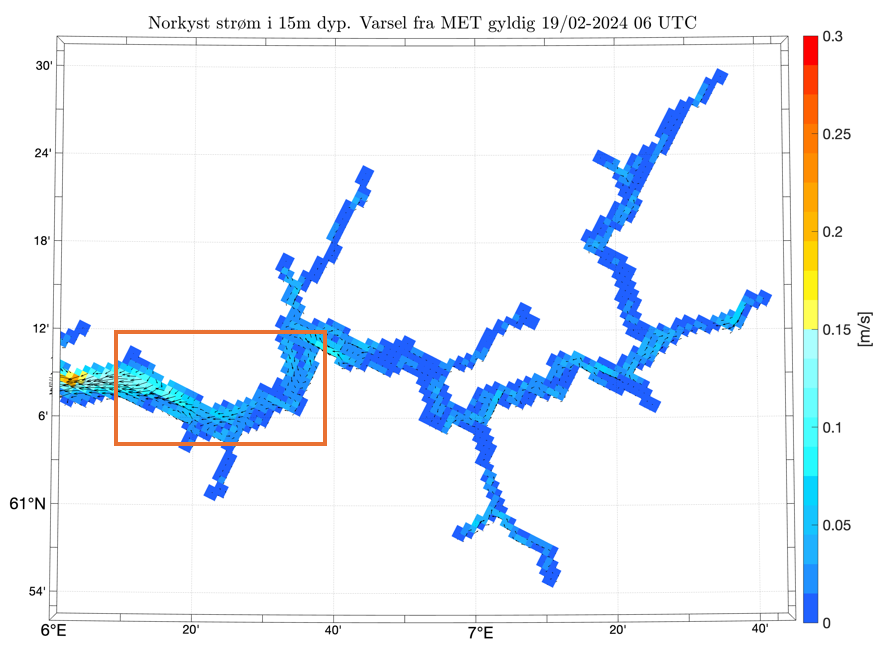
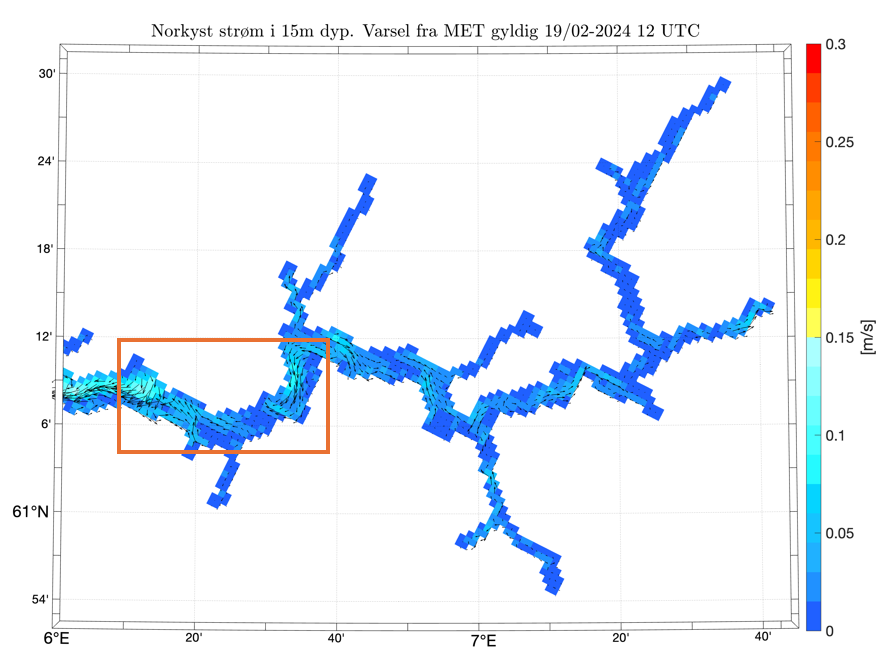
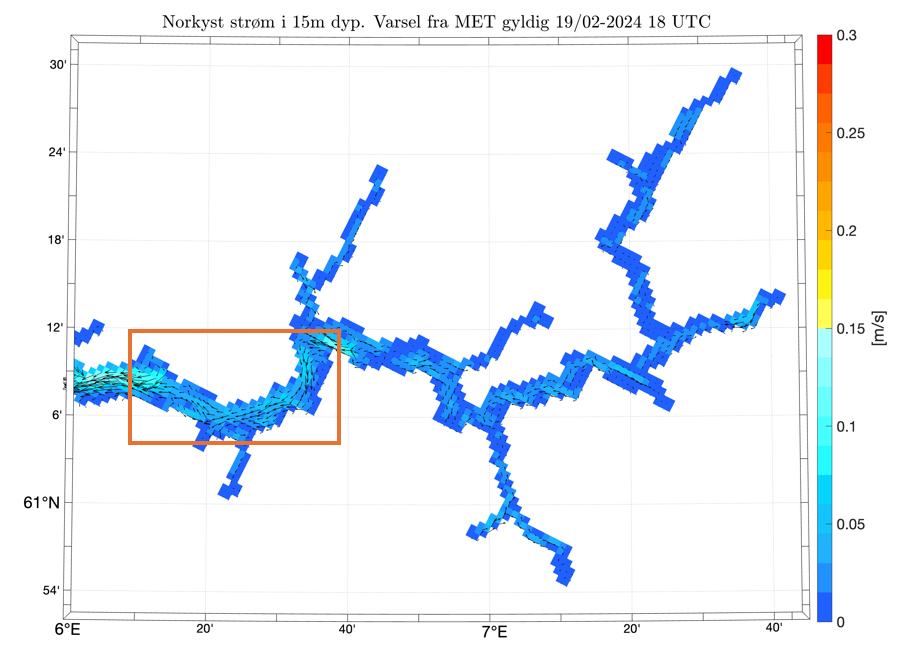
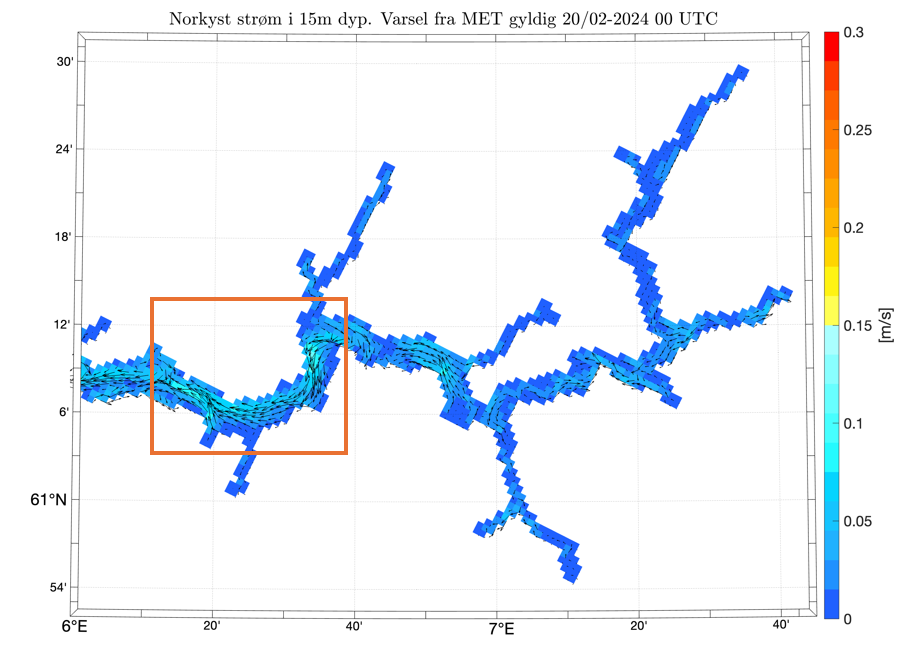
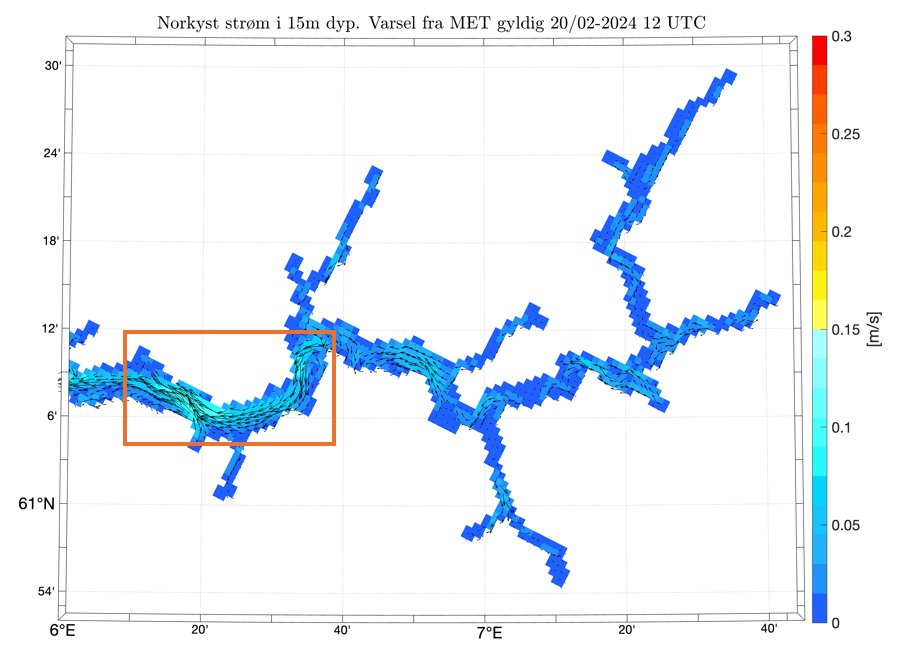
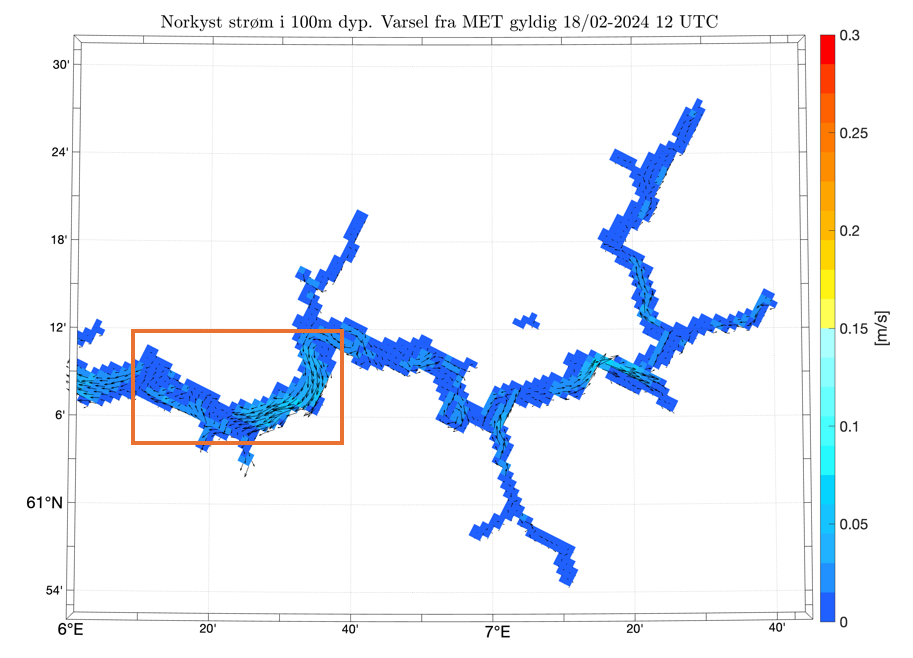
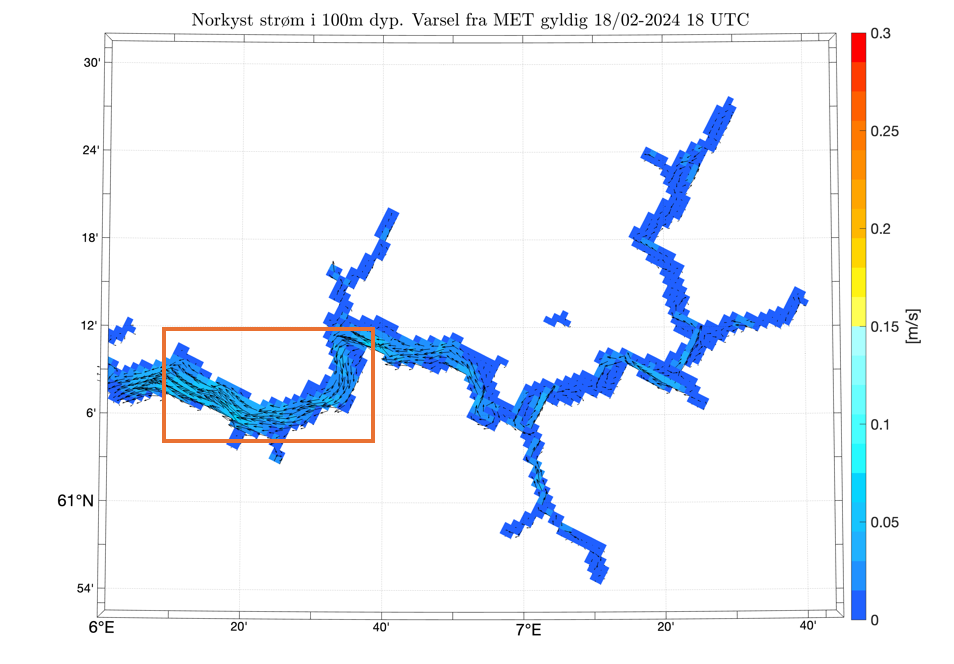
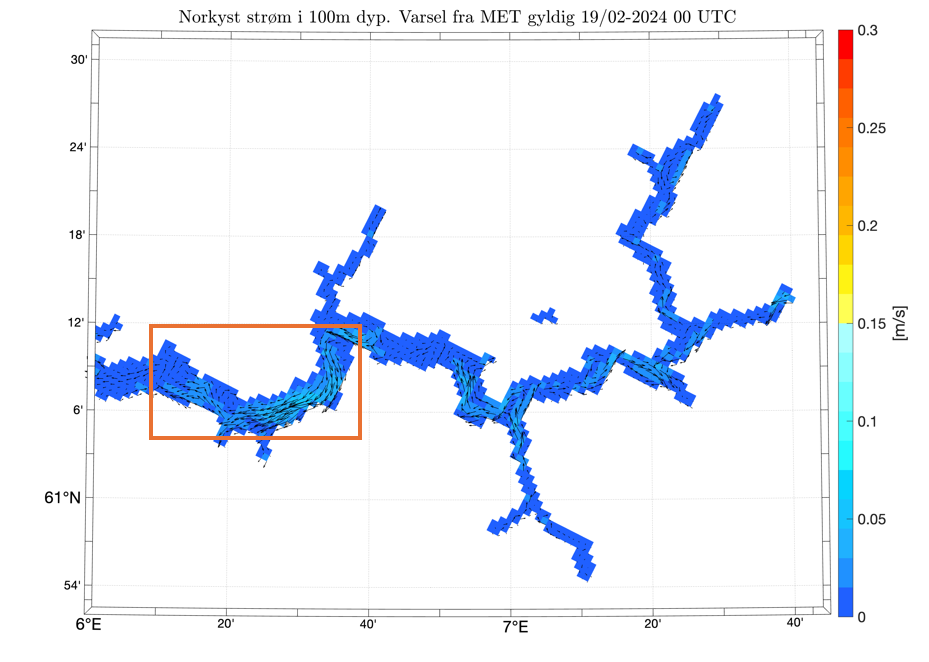
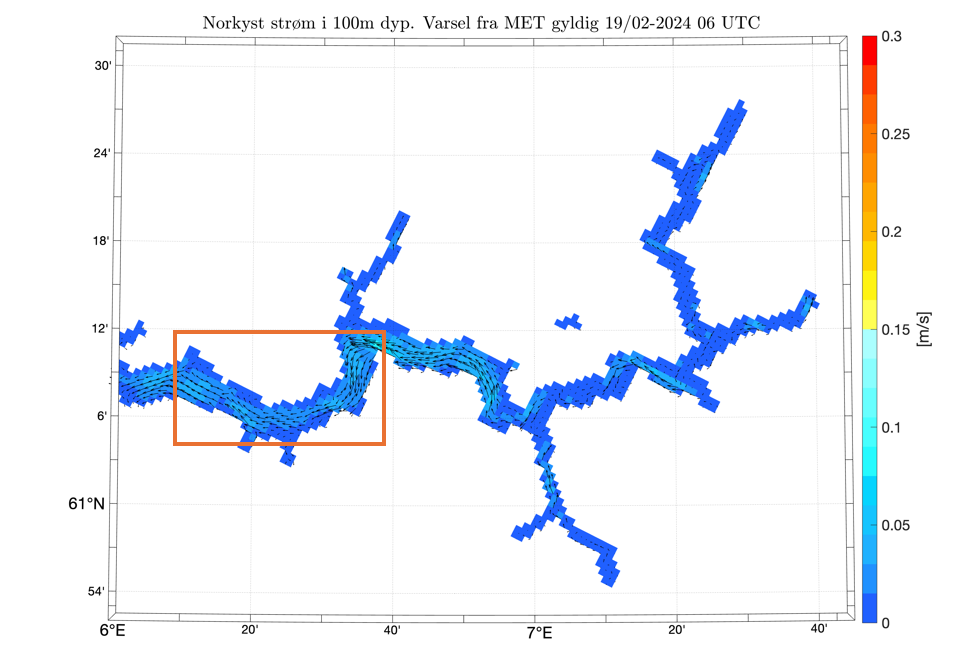
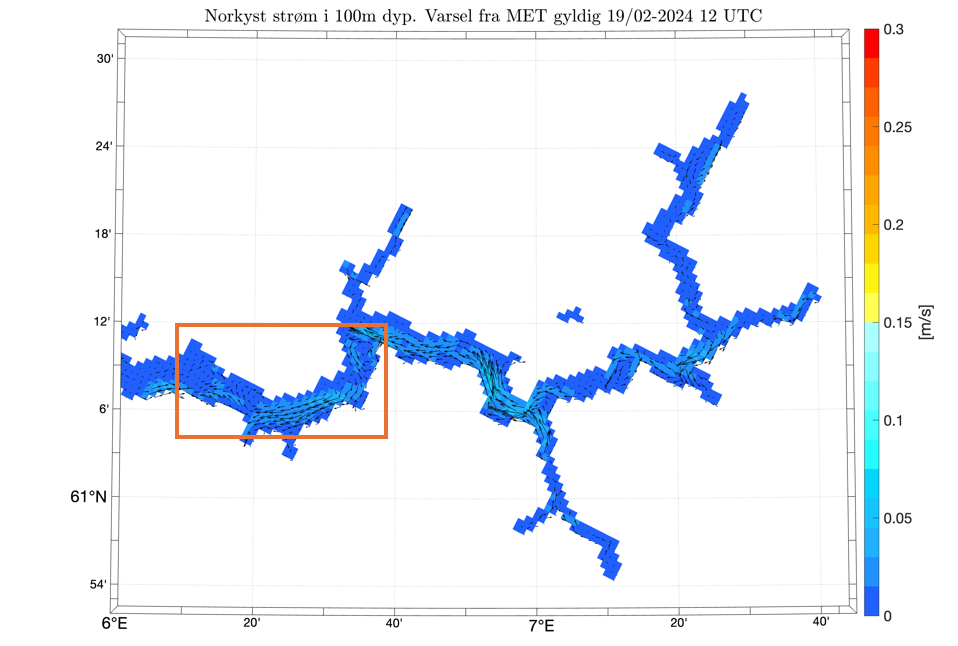
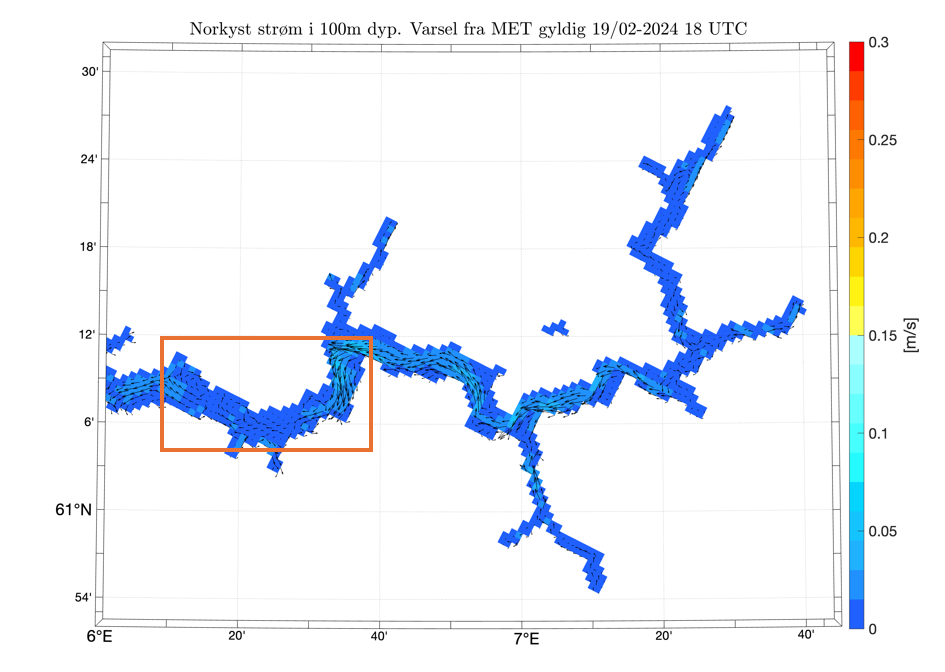
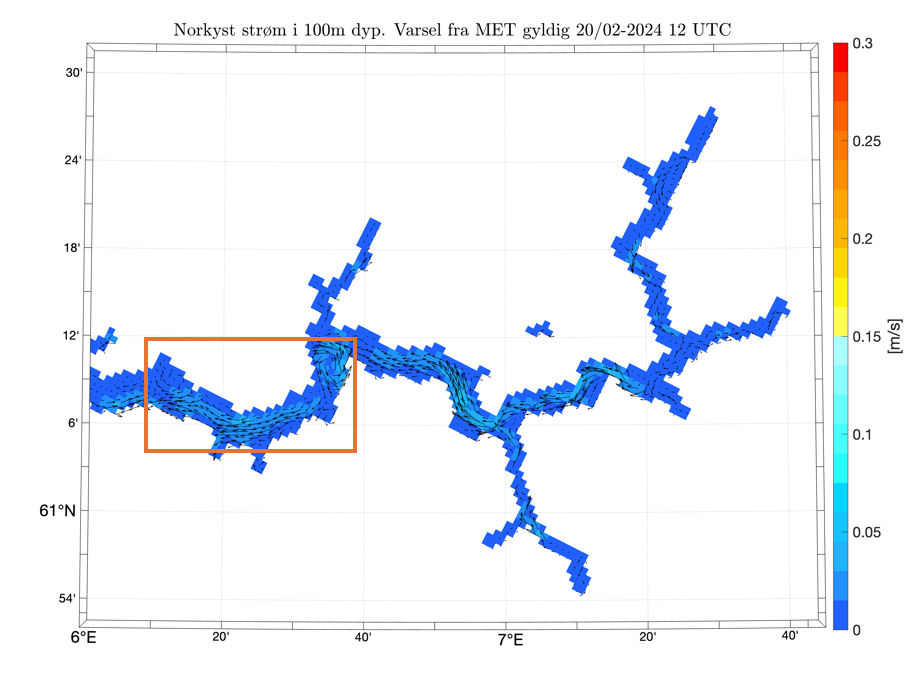
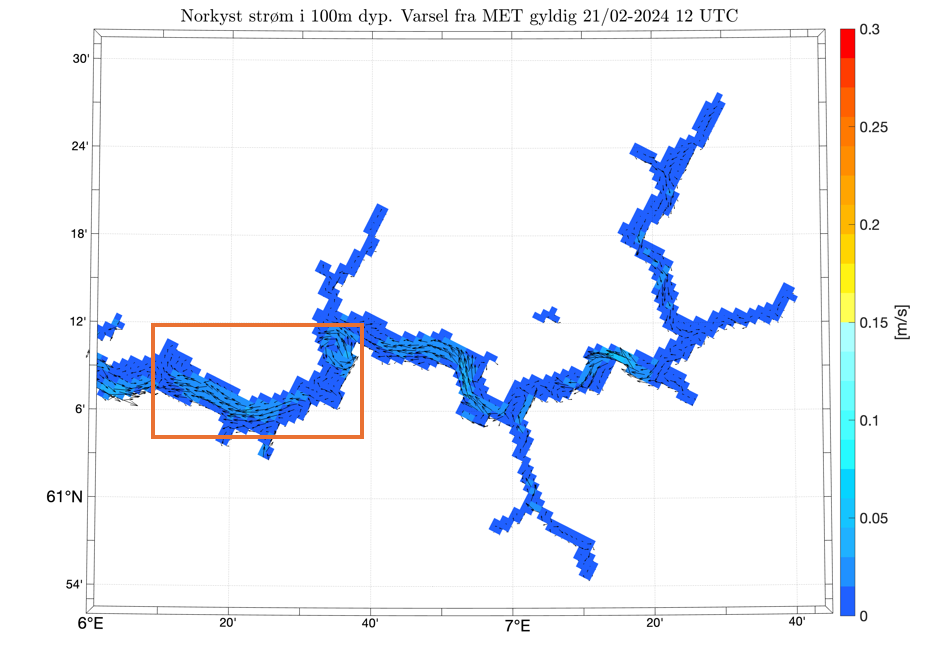
Real time ocean currents during the glider deployments were obtained from the forecast version of the hydrodynamical model system Norkyst (Asplin et al. 2020). Norkyst is developed by IMR and the Norwegian Meteorological Institute. MET-Norway runs an operational version of Norkyst every day and data can be downloaded from https://thredds.met.no. Norkyst covers the entire Norwegian coast and offshore areas with 800m x 800m resolution in the horizontal and is based on the free-surface, terrain-following, primitive equations ocean model ROMS (Regional Ocean Modeling System, http://myroms.org). The model output included ocean currents in 15 and 100 m depth for the study area, in 6 hourly intervals.
3 - Results
In the following we describe the activity with the gliders and the comparison between data from gliders and in situ measurements. No data were available from Syrenna Waterdrone and MESSOR.
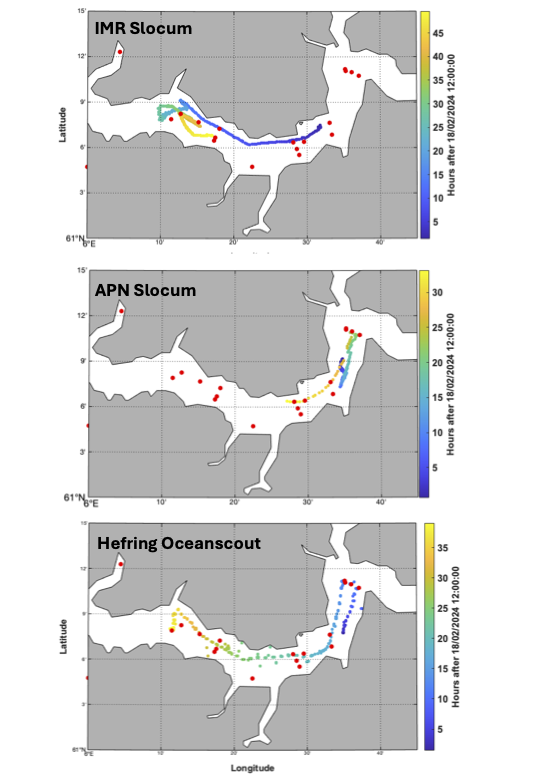
3.1 - Glider Mission
The three gliders were deployed consecutively during 18/02/2024 as indicated by the start of the tracks in Figure 2.
3.1.1 - IMR Slocum mission report
Pre-deployment checks, the deployment and the initial dives close to the ship were performed using a Freewave radio.
Buoyancy pump volume struggled to converge at 500cc but did after it was increased to 600cc. After deepening dives initially, we experienced buoyancy pump oddities and reduced dive depth to 60 m throughout the night to 19/02/2024. We kept the glider on a short section in the western part of the survey region for the night (Figure 2).
The survey route was continued from the morning of 19/02/2024 and dive depths were gradually increased throughout the day to 140m without a return of the buoyancy pump oddities. The glider struggled to make progress in strong currents at the western end of the survey area (see below/Figure 2) and was returned to the parking section overnight to 20/02/2024.
On the morning of 20/02/2024 we avoided the area of strong current by sending the glider directly to the up-fjord leg of the glider survey along the southern edge of the fjord and successfully deepened dives further to 180m. Recovery on the afternoon of 20/02/2024 went smoothly.
3.1.2 - APN Slocum mission report
Pre-deployment checks were done through freewave. Deployment was around 13.00 UTC on the 18th. Initial dives were done close to the ship through Iridium. Depth on the dives was steadily increased until around 17.00 UTC when we got a small leak-detect on the forward sensor on a 150m dive. Afterwards the sensor reported no voltage-drop. It was decided to keep going with 100m dives throughout the night. Currents seemed strong and the thruster was used to keep the glider on track with the less efficient depth restriction.
On the 19th at around 11.00 UTC we started to slowly increase depth to make for more efficient flight. Late evening around 22.00UTC we got another leak-detect with a bigger voltage drop and loss of vacuum at 150m. It was then decided to recover the glider at night. The glider was easily spotted at night due to the strobe, and recovery was fast and trouble-free.
3.1.3 - Oceanscout mission report
The version of the Oceanscout glider during the test have known issues, all of which were expressed during the deployment.
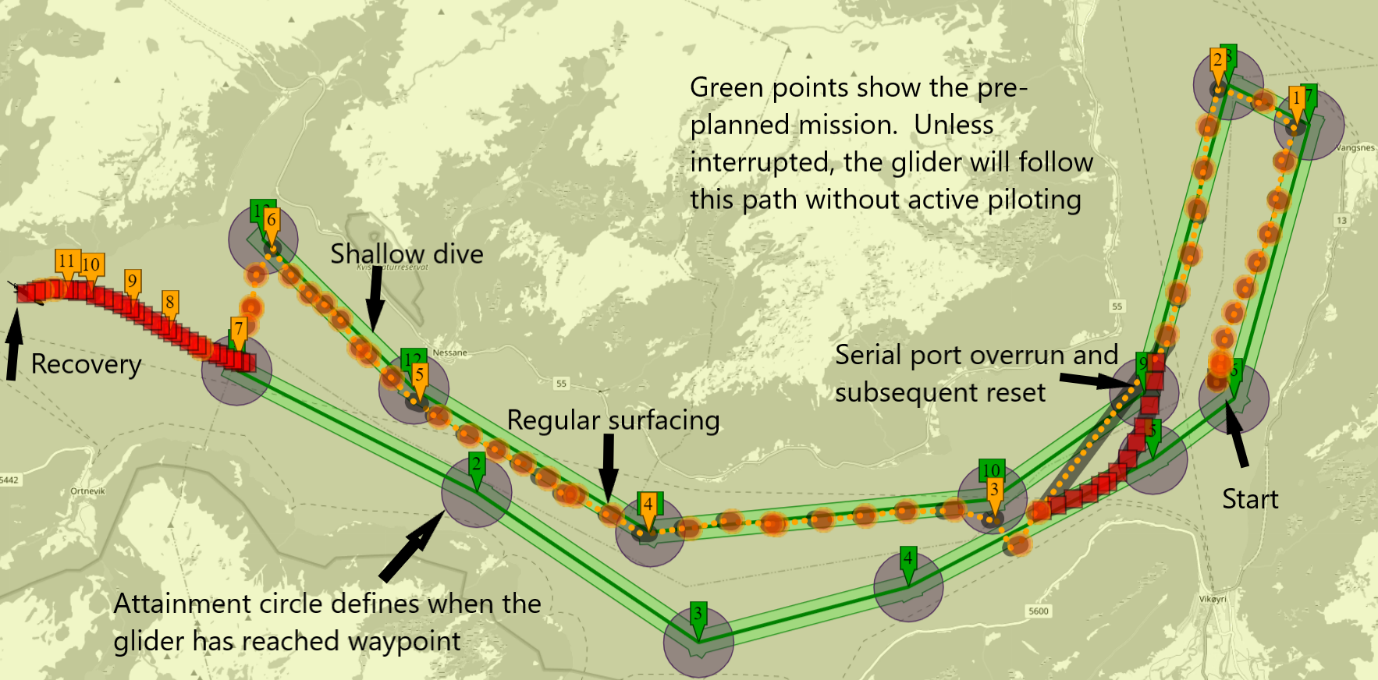
The acoustic sensor in the nose of the glider (altimeter) continually detects the distance from the glider to the bottom. The older version of the altimeter has excessive electric noise, which can lead to false bottom detections. We saw this happening a couple of times at the beginning of the mission (Waypoint 6 in the mission plan, see Figure 3) and sent a command to the glider to reduce the sensitivity to erroneous altimeter readings. We saw this error a few more times during the deployment, leading to individual Yos that would be shallower than the planned setting of 200 m.
Assessing that the glider was going a little slow relative to the overall mission plan, we increased the speed of the glider after waypoint 8 from a 10 cm/s vertical rate to a 20 cm/s target vertical rate. The change increased the average forward speed to a little more than 40 cm/s and reduced the time between surfacing from more than an hour to about thirty-five minutes.
Around waypoint 9, and later around waypoint 1, an old hardware problem in “Gimli” (fixed in later versions of the Oceanscout) led to an overrun condition in a serial port that aborted the dive and made the glider surface. In resetting the glider, we ran into an unexpected issue with delays in transferring messages from the cloud-based software back to the glider. This caused a delay of almost 3 hours before the glider was up and running again. Meanwhile, “Gimli” drifted with the surface currents to an area close to waypoint 10. After a reset, it progressed toward waypoint 10 without additional instructions.
3.1.4 - Glider missions in relation to ocean currents (from ADCP and models)
Ocean flow in the fjord is complex due to stronger effects of winds, tides, stratification and the narrowness of the region compared to the open ocean. The numerical model results showed that the flow in the fjord was highly varying and both along and across-fjord (Appendix 1), implying challenging conditions for the glider missions.
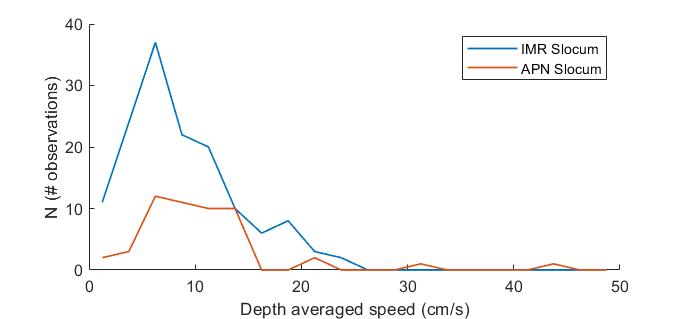
The extra sensors on the IMR and APN Slocum gliders slow their forward velocities compared to gliders without extra sensors. We expected the Slocum gliders to have a forward horizontal velocity of about 20 cm/s. The data from the gliders show that most of the time they were operating in depth averaged water column speeds below 15 cm/s, although at times they were working in substantially higher depth averaged speeds (up to almost 45 cm/s) (Figure 4).
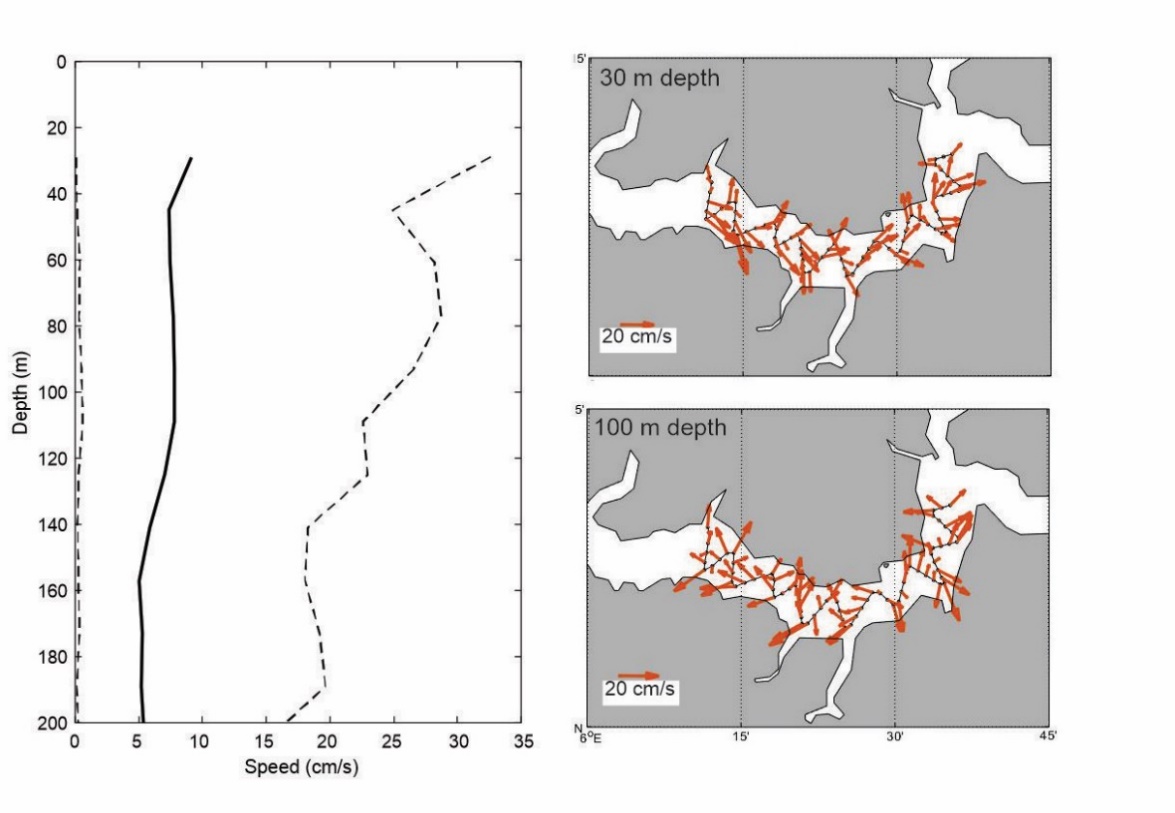
The vessel-mounted ADCP data revealed more details on the vertical structure of the ocean currents in the study area (Figure 5). Maximum instantaneous current speed exceeded 20 cm/s all the way down to ~130 m (Figure 5, left panel). Wind effects in combination with strong stratification between the upper ~30 m and the rest of the water column (Figures 7 and 8) imply that the flow near the surface at times/locations likely was substantially stronger. Also, at times/locations, the flow in upper and intermediate layers were rather strong (~20 cm/s) and with opposite directions (Figure 5, right panels).
3.2 - Glider data collection
3.2.1 - IMR Slocum data collection
Sensor data for science and engineering was collected on both up- and downcast and written to high-resolution files every second and low-resolution files every 30 seconds. See section on data processing below for a more detailed description.
3.2.2 - APN Slocum data collection
Sensor data for science and engineering was collected on both up- and downcast and written to high-resolution files every 4 seconds and low-resolution files every 24 seconds.
3.2.3 - Oceanscout data collection
AHRS navigation data, GPS data, and CTD data were collected throughout the mission without gaps or significant spiking. The average pitch was very close to the target angles of -25/+25 degree relative to the horizontal. The target descent/ascent vertical motion (measured as dp/dt) was 0.1 m/s for the first two waypoints and then changed to 0.2 m/s for the rest of the mission. These values are continuously controlled by changing the buoyancy engine during the ascent/descent and the data show that the targets were achieved throughout the deployment.
The CTD data is recorded with a resolution is 0.5 m in the upper 10 meters of the water column and reduced to 5 m when deeper than 10 meters. Data is collected only on descent. This non-traditional data collection scheme is inspired by input from numerical ocean modelers and is currently not adjustable at the user level. The CTD - as sampled - is not particularly useful for mixing studies.
The accuracy specification of the temperature sensor is limited to 0.01 C, but the resolution is 0.001 C. The calculated density profile was self-consistent across the mission in the sense that it always showed heavier water below lighter water.
3.3 - Glider Data Format & Processing
3.3.1 - Teledyne Webb Slocum gliders (IMR & APN)
Both Slocum gliders transmitted a subset of the engineering and science data back through Iridium during the deployment, while the full dataset was downloaded via cable from the glider after the finished deployment. All files from Slocum gliders were sent or transferred in compressed proprietary binary format and files were decompressed in the Slocum SFMC software.
Further processing of the data from both Slocum gliders was performed with the open-source Python package Pyglider (https://pyglider.readthedocs.io/en/latest/).
APN: After removing 4 corrupt and empty engineering dive netcdf files, files for the individual dives were merged for engineering and science, combined into one timeseries and each dive was then vertically gridded in Pyglider.
IMR: Initial processing of the downloaded full science dive files revealed that in most of them the high-resolution science sensor data below 50m were missing. During a subsequent dialogue with Teledyne Webb support we concluded that this was most likely caused by a software bug on the glider science processor. Data presented in this report are full resolution timeseries files for the top 50 m and from the low-resolution science files below that.
3.3.2 - Hefring Oceanscout
Science and engineering data was delivered both in netdcf and Matlab format.
Note that profiles in science data files have a much higher time/vertical resolution than described in the data collection section and the interpolation procedure is not specified. The engineering data is saved with a different time resolution to the science data files.
Data in both files are saved as timeseries, not profiles. To us, no software package was available to match science and engineering files and to produce a complete data set of vertical profiles with matching position and engineering observations.
3.3.3 - Temperature and Salinity Observations
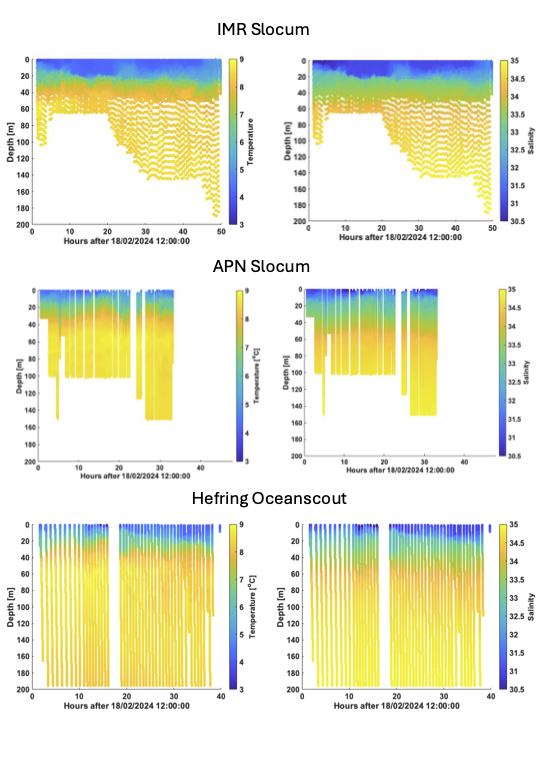
The CTD sensors on all gliders capture the basic water column structure in the survey area in Sognefjorden with warmer, saltier Atlantic Water below 50 m and a cooler, fresher surface layer (Figure 7).
Glider sections indicate that there is variability in the temperature and salinity of the surface layer and the depth of the pycnocline towards the Atlantic Water layer. The gliders covered different parts of the survey area during their ca. 2-day deployments (Figure 2) and some of the variability is likely spatial.
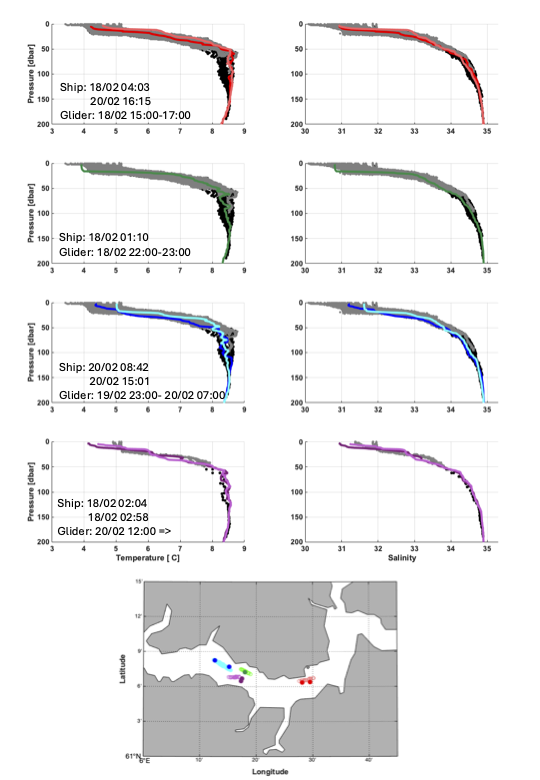
A comparison of ship CTD profiles and coinciding IMR glider observations shows close agreement for depths below 150m indicating that the data quality from the RBR Concerto CTD is comparable to that of the ship’s Seabird 911 system (Figure 8). Temperature and salinity profiles above 150m agree in principle, but they show clear signs of likely mainly temporal variability (Figure 8), but the full glider sections indicate some small-scale spatial variability (Figure 7).
During this cruise, the ship CTD station shown in Figures 1 and 2 were not taken in consecutive sections, but they were distributed across the survey area to give a safety margin to all three gliders. There are thus up to 48 hours between the ship CTD stations and the observations, and this is likely responsible for some of the differences between ship and glider observations (Figure 8). However, we considered multiple glider profiles in this comparison for each one or two ship profiles and the spread of the glider profiles indicates that there is variability on both short temporal and spatial scales in our survey area in Sognefjorden.
The temperature and salinity sections in Figure 7 illustrate the ability of the gliders to capture this small-scale variability. They also illustrate the different processing stages and steps for the glider data, as described in the section on processing.
3.3.4 - Rhodamine, uranine, CDOM and chlorophyll
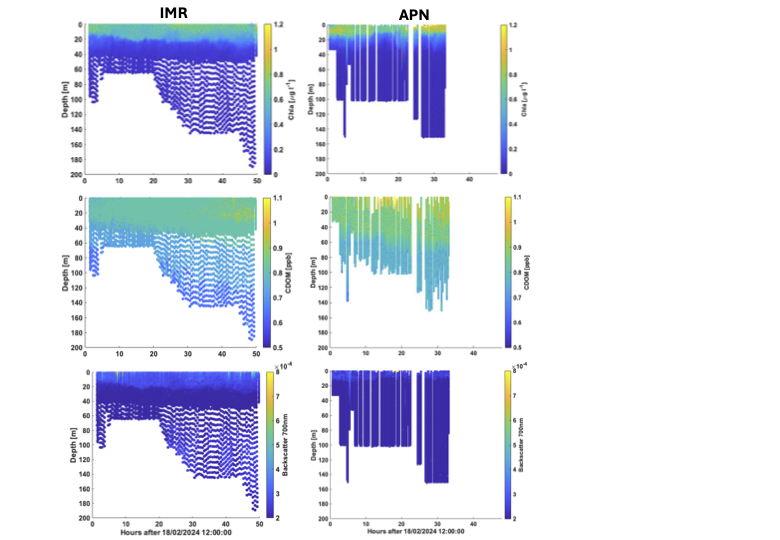
Figure 9 shows raw data from the Seabird Eco-Triplets on the IMR and APN Slocum gliders representing Chlorophyll-a, CDOM and Backscatter 700nm. Note that no correction or calibration was performed on the data. For Chlorophyll-a, dive depths throughout the missions were likely too shallow to obtain a reliable dark count. Chlorophyll-a concentrations were likely too low for quenching to occur.
Maximum Chlorophyll-a concentrations from the two glider sensors of 0.8-1.0 µg/l in the surface layer agree well with concentrations from ship CTD bottle samples.
The roughly 0.2 microg/l difference in maximum Chlorophyll-a concentration between the two gliders may be due to the lack of calibration. However, the thickness of the surface layer in the Chlorophyll-a sections agrees well with that seen from the temperature and salinity data in Figure 7 with a deeper surface layer in the western part of the survey area (IMR) and a shallower one in the eastern part (APN). This may have led to phytoplankton being mixed throughout a thicker layer in the western part of the survey area.
3.3.5 - Nitrate
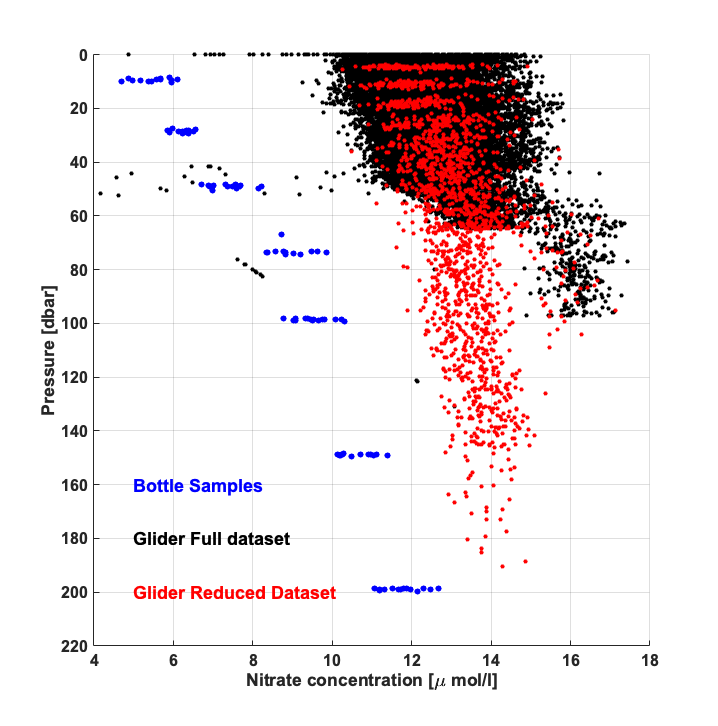
Comparing nitrate concentrations from bottle samples from the ship’s CTD and the SUNA installed on the IMR Slocum glider we find a considerable offset of approximately 4-6 micromol/l (Figure 10).
Referencing the OceanGliders Standard Operating procedure for nitrate sensors on gliders (https://oceangliderscommunity.github.io/Nitrate_SOP/README.html) we note the following possible reasons and solutions for this for future reference:
SUNA nitrate sensors use UV spectroscopy to measure nitrate concentrations. To convert UV spectra to nitrate concentrations, these have to be corrected for the absorption by Bromium using salinity which is closely correlated to Bromium. SUNAs on gliders currently do not receive salinities from the CTD to do this, but use an onboard optimization procedure that commonly degrades the accuracy from 0.3 micromol/l to 2.3 micromol/l.
The optimization procedure on the SUNA likely assumes open ocean salinities around 35 psu, while salinities in Sognefjorden were fresher than this, especially towards the surface. This offers an explanation for a larger offset near the surface than at deeper depths.
Solutions to improve this are frequent calibration (in the lab or on the ship CTD) and reprocessing of the full SUNA UV spectra using the correct salinities after the glider has been recovered.
3.3.6 - Oxygen
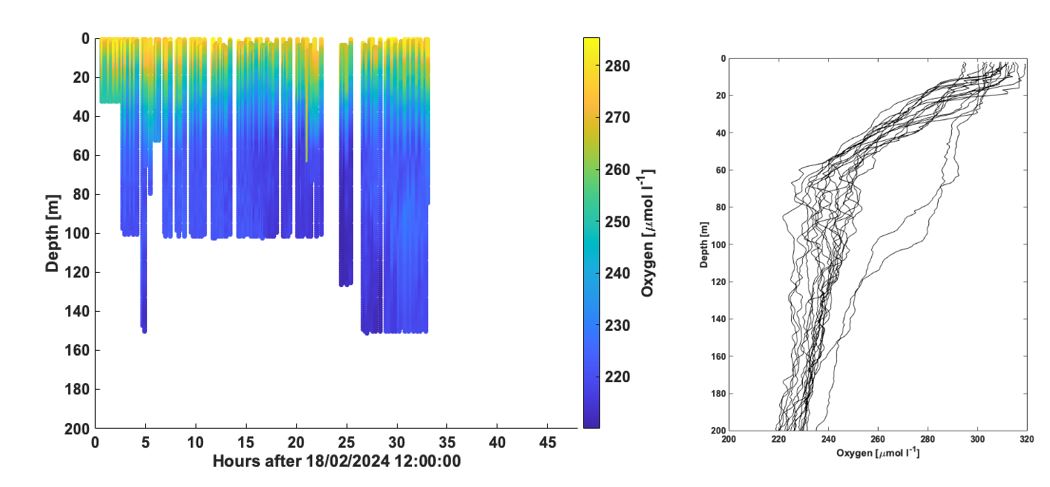
A rough comparison shows that oxygen concentrations from Aanderaa Oxygen Optode on the APN Slocum glider and the oxygen sensor on the ship CTD show similar gradients in oxygen concentration between the surface layer and the deeper Atlantic Water sourced layer (Figure 11). Absolute oxygen concentrations also agree roughly between the two data sets.
There are several caveats in this quick comparison:
The oxygen sensor on the ship CTD was last calibrated 10 March 2022 and may have thus experienced sensor drift in the two years leading up to the cruise. No Winkler titrations were performed during the cruise to calibrate the sensor oxygen concentrations. The offset between the two datasets may thus also potentially be due to the drift of the ship CTD sensor.
The Anderaa Oxygen Optode on the APN Slocum glider was last calibrated 14/02/2021.
In addition to this we have not corrected the glider oxygen data for the sensor lag of the Aanderaa Oxygen Optode which accounts for the stripiness of the data for the up- and downcasts. Please refer to the Oceangliders Oxygen SOP for more detail on correcting and calibrating oxygen optodes on gliders (https://oceangliderscommunity.github.io/Oxygen_SOP/README.html).
3.3.7 - Zooplankton from UVP6
The text describing the UVP-6 data is extracted from the report “A brief account on the abundance and vertical distribution patterns of plankton profiled with the Underwater Vision Profiler (UVP6)” by Kanchana Bandara (PhD), Researcher (Ecosystems) at Akvaplan niva.
Overview of data, repository and pre-processing
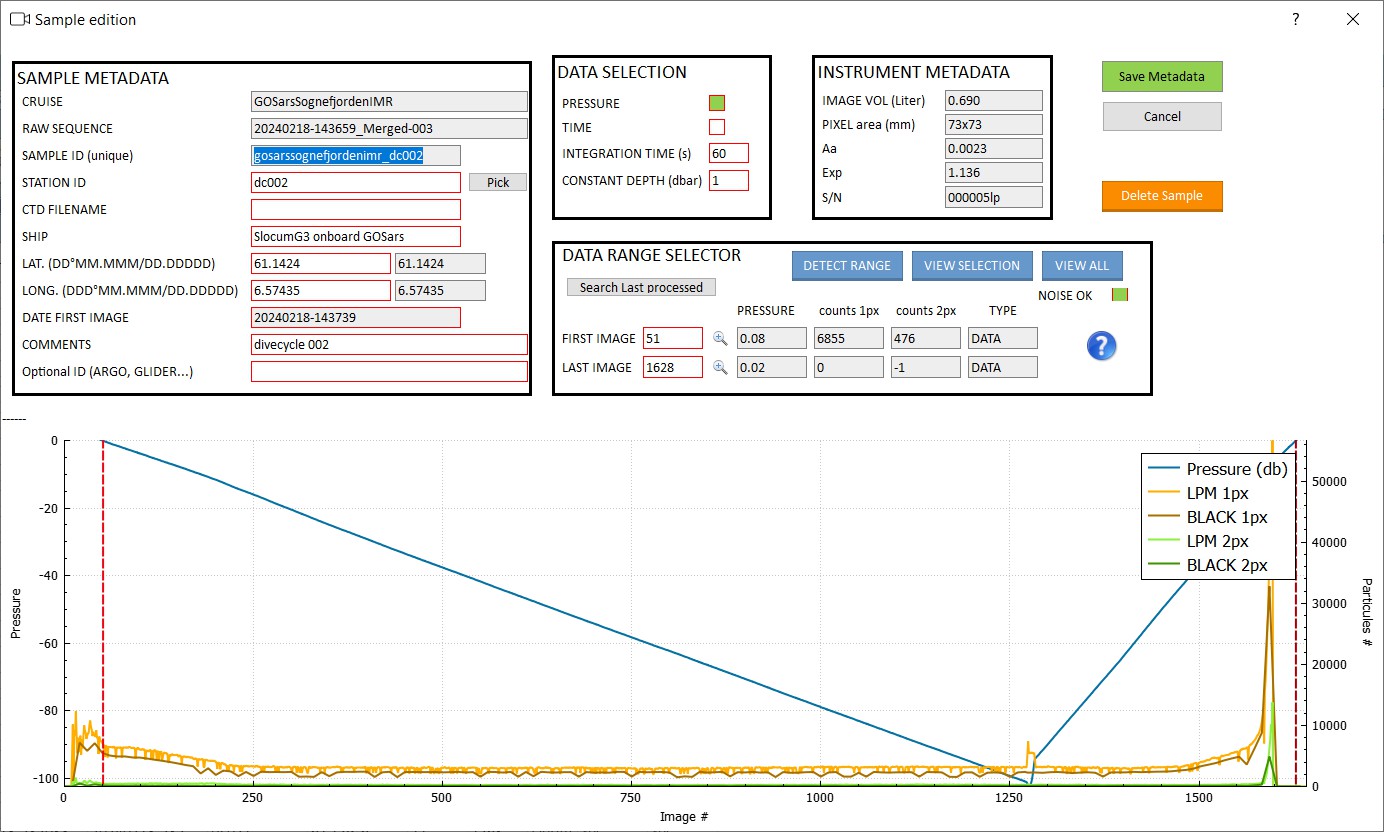
In total, the Slocum G3 with affixed optical payload (UVP6) performed 72 yo-yo dives during the two-day deployment in Sognefjord. While the Slocum stayed within the mid-fjord (Figure 12), most of its dives ranged between 0-100 m, while a few extended down to 150 m. The UVP6 continued to record both on ascend and descend phases of the Slocum’s voyage. In this project, one complete descent-ascent cycle (Figure 13) was considered as a single ‘sample’, which, altogether, generated 72 samples.
This dive-cycle-based sample separation was performed manually as there is no automated pipeline for this for Slocum. The data of the 72 samples were processed and the project was uploaded to EcoPart project no. 898 and EcoTaxa under the project no. 12105 and name “UVP6 GOSars Sognefjorden IMR”. Both these projects were opened to the IMR team with administrative access. Visual representations of each of these samples (descent-ascent cycles) and other taxonomic and particle details can be accessed via https://ecopart.obs-vlfr.fr/prj/898 (NB: requires authentication).
Location data are from the autopilot/navigation output synchronized with the EcoTaxa particle module (898).
Plankton, particles and other objects detected by the UVP6
During the two-day deployment, the UVP6 imaged 6829 objects of interest. In the iterative classification performed in EcoTaxa version 2.6 (https://ecotaxa.obs-vlfr.fr), these objects were ultimately classified (annotated) to 35 living and non-living categories (Figure 14). Classification was done in a Machine Learning engine driven by boosted regression trees using the XGBoost package with no Deep Learning support available. With human input, ca. 97% of these automated annotations were validated. From these, 18 ecologically relevant categories (Table 2) were used in the analyses. Some images of hydrozoans (artefacts) and Collodarians could not be manually validated.
Numerical abundance
From the 18 planktonic and detritus categories, living entities dominated the estimated total abundance (Table 2). This is somewhat surprising for the UVP6 data, as much of the objects detected by it are particles in the water. The dominance of living categories was largely driven by the overwhelming presence of copepod nauplii (estimated total abundance: ca. 14668 ind.m-3). It should be noted that in general, UVP6 imagery is not optimal for the detection of naupliar stages. However, in 2023, Akvaplan niva AS obtained a large (> 5000) set of nauplii images in a controlled lab experiment, which were used to train the EcoTaxa and in-house PlanktonVision classifiers. Although the “nauplii” category does not look like actual nauplii in the UVP6 vignettes (due to resolution limitation of the camera), they have a well-defined shape and size that is recognized with very high accuracy by the classification algorithms. Apart from naupliar stages, a large number of copepods were also imaged during the deployment (Table 2). Amphipods, harpacticoids, chaetognaths salps, siphonophores, ctenophores and shelled gastropods were the rate taxa that were detected by the UVP6 (total abundance < 50 ind. m-3). Among the non- living entities, detritus was classified into three categories based on the shape, where elongated forms are in the ‘fiber’ or ‘filament’ categories and other blobs are in the general ‘detritus’ category.
| Category | Status | Estimated total abundance (ind. m-3 ) |
| Rhizaria | L | 422.29 |
| Eumalacostraca | L | 325.53 |
| + Amphipoda | L | 16.22 |
| Copepoda | L | 6335.28 |
| + Calanoida | L | 170.58 |
| + Harpacticoida | L | 25.85 |
| + Copepoda nauplii | L | 14667.20 |
| Ostracoda | L | 52.34 |
| Chaetognatha | L | 20.58 |
| Appendicularia* | L/NL | 275.55 |
| Salpida | L | 26.51 |
| Siphonophorae | L | 36.40 |
| Cnidaria** | L/NL | 141.86 |
| Ctenophora | L | 18.26 |
| Limacinidae | L | 5.21 |
| Detritus | NL | 6632.83 |
| + fiber | NL | 2159.06 |
| + filament | NL | 2178.90 |
*Living (L) and non-living (NL) entities merged; **Artefacts only (e.g., tentacles)
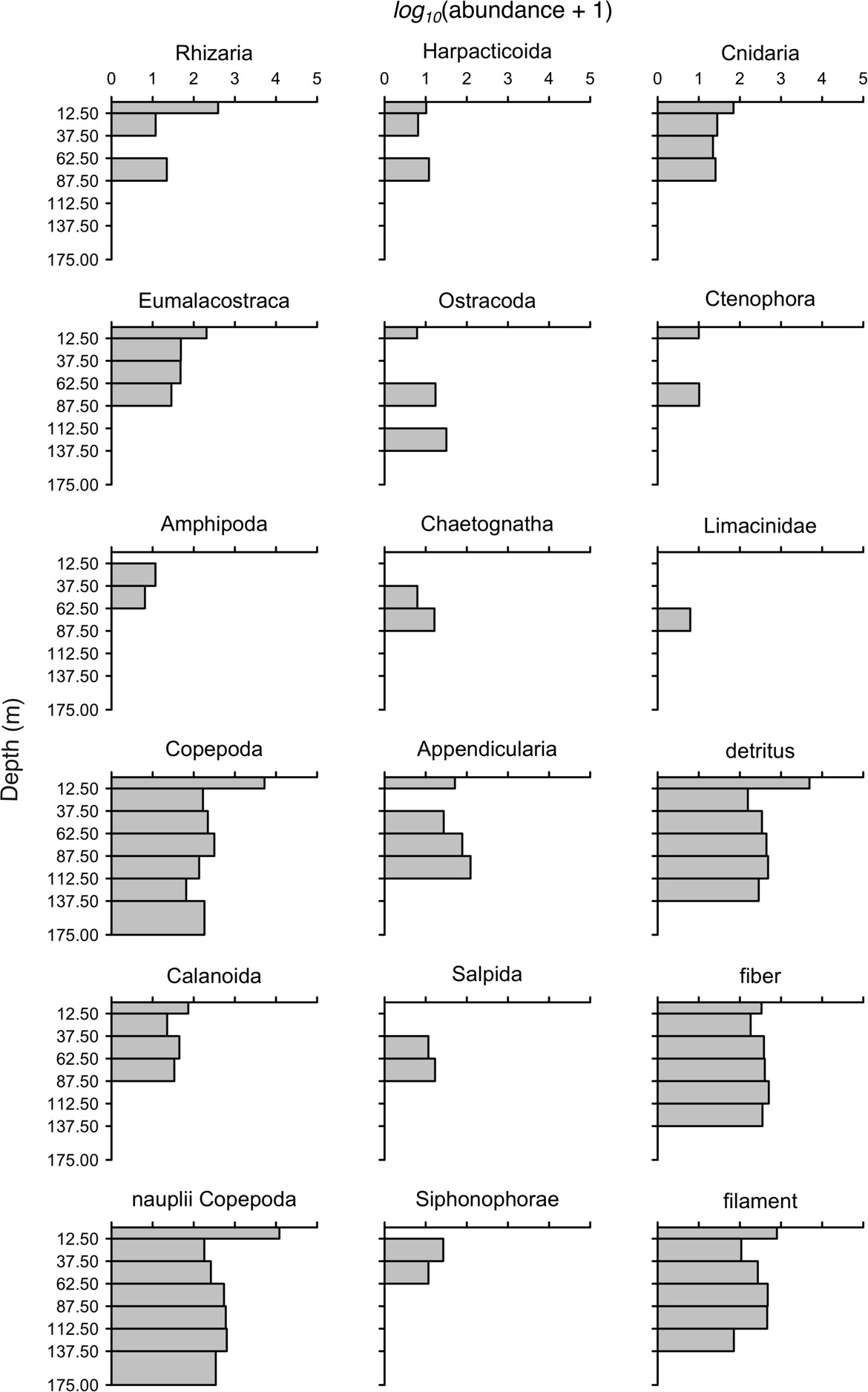
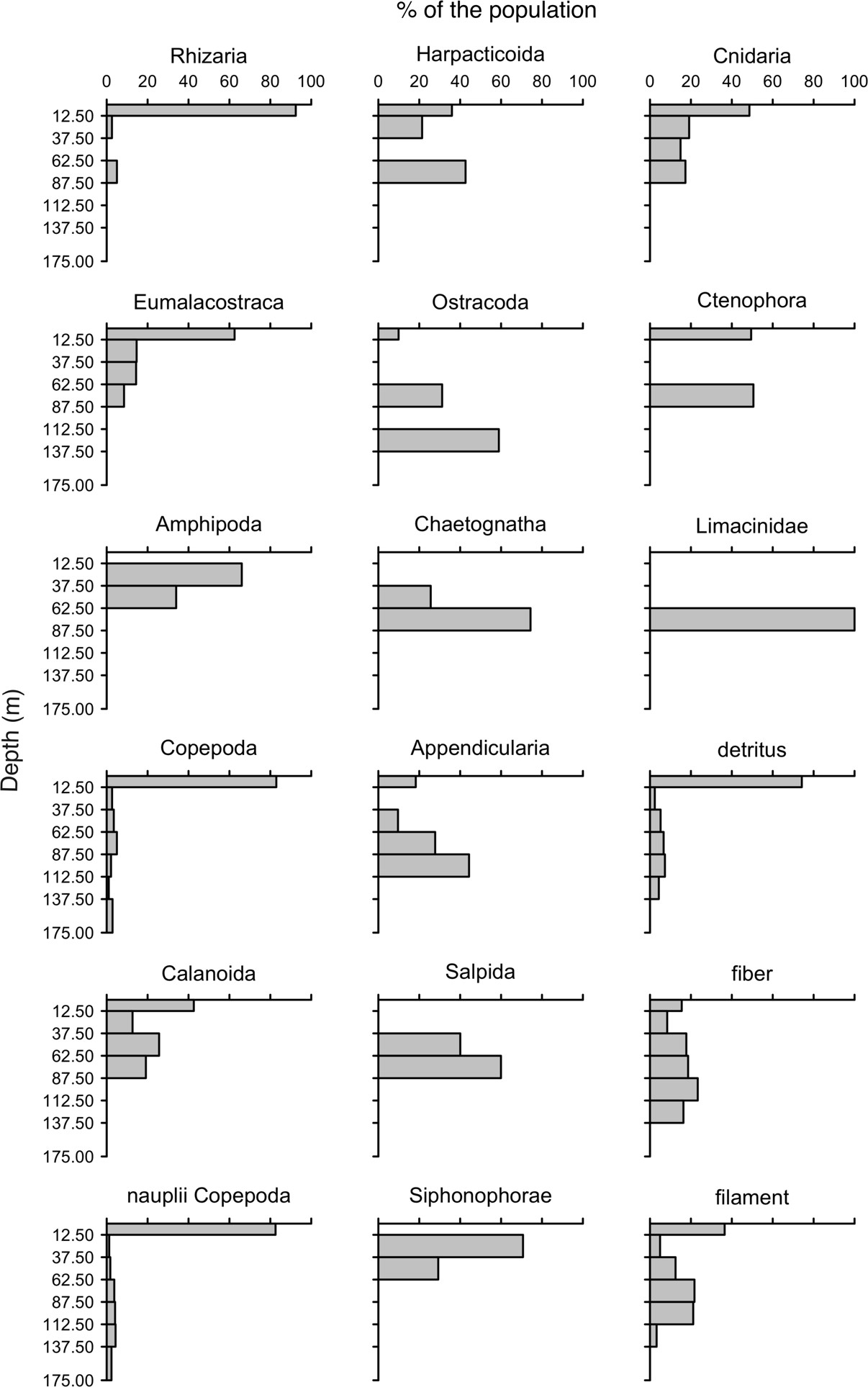
Vertical distribution
More than 70% of the dominant zooplankton taxa imaged by the UVP6 were concentrated in the upper 20 m of the water column (Figures 15 and 16). In contrast, several rare taxa, such as Chaetognatha, Ctenophora, Ostracoda and Appendicularia had higher abundances in the mid- water column (Figures 15 & 16). However, it should also be noted that the UVP6 may have undersampled some of these rare taxa, and therefore, the estimated abundances may be too low for inferring to their vertical distribution patterns. Blob-like detritus (‘detritus’) was distributed in higher concentrations in the upper 20 m. However, fiber (‘fiber’) and filament (‘filament’) type detritus were more or less uniformly distributed across the water column.
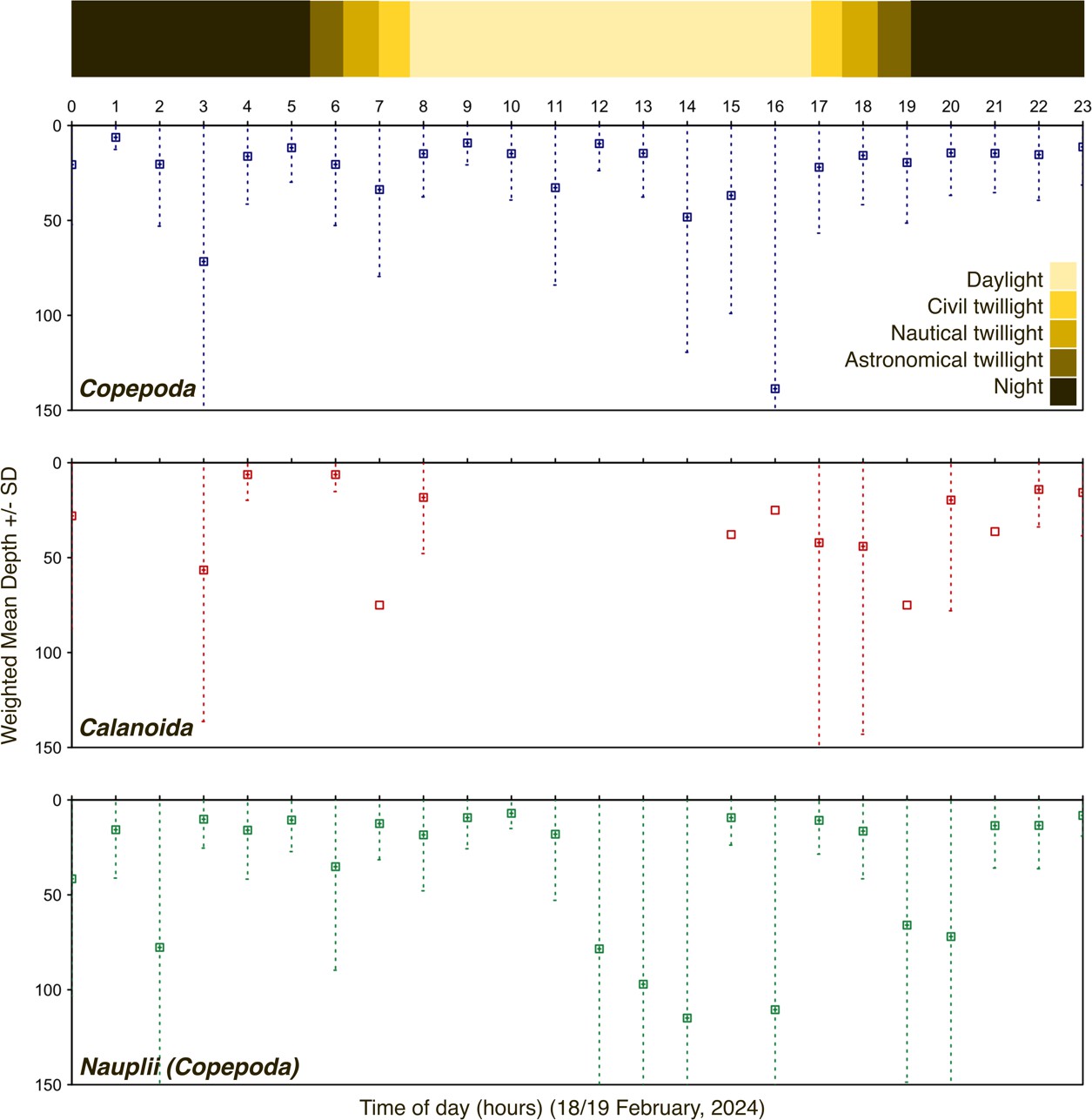
Vertical behavior of some dominant zooplankton
The taxa with highest numerical abundance, i.e., Copepoda and nauplii (Copepoda) along with Calanoida showed somewhat interesting diel patterns of vertical behavior during the ca. two- day study period. Both Copepoda and their nauplii appeared to have descended from the near- surface waters into deeper layers during the afternoon (Figure 17). Here, Copepoda (= advanced developmental stages) started their descent relatively late, beginning from ca. 1400 hrs. local time. A similar pattern is evident among Calanoida, but their abundances are too low to make a strong argument in this regard. In comparison, smaller naupliar stages started their descent at noon. Irrespective of the descent timing, all three taxa & ontogenetic stages were back closer to the surface during the nighttime (Figure 6). However, it is highly doubtful if small nauplii with reduced swimming capability can make such strong vertical migrations. Therefore: (i) nauplii category may have contained other smaller stages, such as early copepodites and/or (ii) these vertical dynamics could have been driven not only by individual motivation but by some passive forcing (e.g., vertical mixing). Hydrography data and in-situ irradiance data (that factors-in the cloud cover) are required to properly understanding of the drivers of these apparent behavioral dynamics.
Summary
Irrespective of a relatively short deployment, UVP6 has captured > 6000 images of objects of interest, out of which, the majority was annotated and rendered ecologically useful. Assuming that the annotation and validation are accurate, it appears that there are more biological (living) entities in the data than non-living ones. This is somewhat strange for UVP6 data, which, for the most part images particulate matter than plankton. However, it should be noted that late February and early-March aligns with the timing of the spring bloom in Sognefjorden (http://hdl.handle.net/11250/2456025). This explains the higher abundance of naupliar stages in the surface layers. However, as mentioned earlier, hydrography data should be inferred to when making strong statements in this regard. Presented in this brief report is an analysis focusing largely on living plankton taxa – focusing on their abundances and vertical behavioral dynamics. Further efforts can extend towards, for example, studying different size distributions of living and non-living entities and their spatial (vertical and lateral) distribution. Whichever the focus is, hydrography data is central for decoding the emergent patterns in the UVP6 data.
Comparison of UVP6 and net sampling
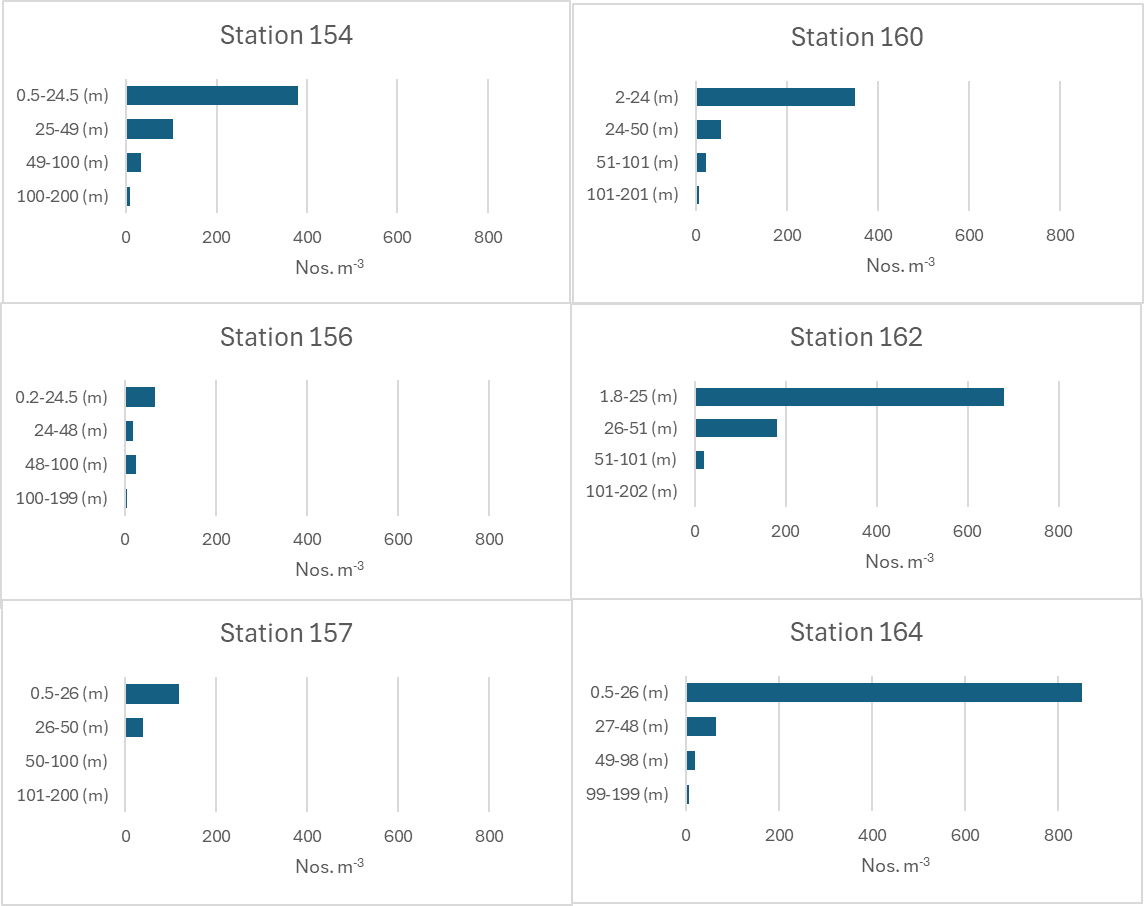
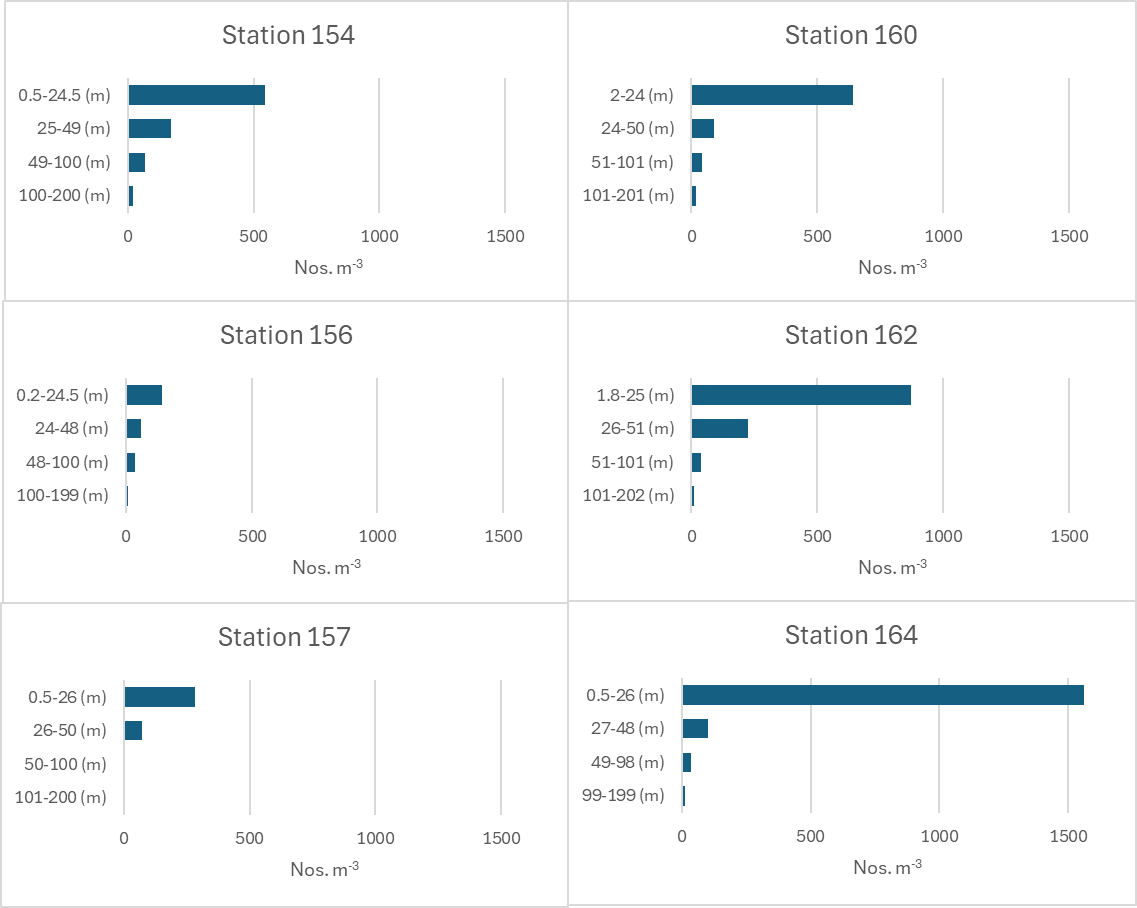
For this comparison of the abundances recorded by the UVP6 and the Multinet Mammoth system we will only use the data from the nets shallower than 200 m since this is the maximum depth range covered by the APN Glider carrying the UVP6.
Most copepods both total and the calanoids were found in the shallowest depth (Figure 18 and 19). The Multinet abundances obtained by microscopic analyses contained much higher diversity than what was identified by the UVP6. However, the vertical distribution patterns and the abundances of calanoid copepods as well as all copepods were within the same order of magnitude.
4 - Discussion
In this test survey we simultaneously collected data with marine robotics and standard sampling. Different gear was tested, including three autonomous gliders sampling selected physical, chemical and biological parameters. Assessing the stated main goal of the survey was challenging due to the short duration of the survey and deployments, since some of the equipment did not work as intended, and because the weather prevented testing at a standard (offshore) section. Nevertheless, the survey proved useful for testing and gaining experience with gliders. The results are discussed below.
4.1 - Glider mobility and capability to follow the overall mission plan
Due to winds and tides, and strong vertical stratification (due to freshwater runoff) complicating the ballasting of the glider, glider missions in fjords are challenging. Adding to this, the gliders are most of the time either missioning along or straight against the strong flow (since the dominant flow in the fjord is along the fjord). These challenges were also clear in our test survey. Note, however, that the length of the glider deployments varied between 36 and 48 hours and was thus short in comparison to standard glider deployments.
Hefring Oceanscout showed better capability to follow the overall mission plan compared to the two Slocum’s, likely due to its larger buoyancy pump compared to glider size. It was the smallest and easiest glider to deploy and recover and was equipped with a temperature and salinity sensor only (no biogeochemistry or biology).
The Slocum gliders are substantially larger than the Hefring Oceanscout and both were equipped with more and larger sensors (cf. section 2.2). Their performance appears to be linked to the number and size of sensors on the glider. Most of the time also the Slocum gliders were able to follow the mission plan, although not when facing the strongest currents.
We do not have measurements of the exact flow speeds the gliders were facing. Maximum observed currents in 30 m depth reached almost 35 cm/s (Figure 5) and maximum flow speed near the surface likely was substantially stronger. An earlier Norkyst800 simulation revealed along-fjord surface currents up to almost 70 cm/s in our study region (Storesund et al., 2017).
Based on the above we conclude that Hefring Oceanscout seems most suitable for conducting glider missions in fjords and coastal regions. Slocum gliders with additional sensors, on the other hand, deviate from the overall mission plan when facing the rather strong along-fjord currents and tides. Given the high variability and strong gradients on small horizontal scales which are dominant in most fjords, a high capacity to follow the mission plan is crucial for glider missions in fjords. Thus, Slocum gliders equipped with additional sensors seem not as suitable for glider missions in fjords.
4.2 - Workload with deployment and data processing
Below we discuss the workload and ease of use of the gliders, including both deployment/recovery and data processing.
The Hefring Oceanscout had a straightforward ballasting procedure covering a wide range of densities. In comparison, the Slocum’s ballasting procedure was rather complicated and covered a narrower density range. Adding to this, the Hefring Oceanscout was lighter and more easily deployed and recovered.
As for piloting the gliders during the missions, the workload and ease of use appeared to be rather similar for the two glider types.
As for data processing, the Hefring Oceanscout had an established data interface and data were available quickly in established, easy to read data formats. However, establishment of a processing tool to merge science and engineering data into a gridded profile-based format would be necessary and better transparency of how data is written and interpolated in the files provided would be desirable.
Data from both Slocum gliders was processed at IMR. The main initial challenge was that data from Slocum gliders is written in a proprietary binary data format that needs to be converted to a more established format like netCDF for further processing. This applies to both transmitted and downloaded files. Community-based conversion and processing packages are available, but there is currently a shift from an older Matlab-based solution to a newer Python-based package, Pyglider, which we used for data processing.
Initial challenges using Pyglider turned out to be due to issues with the data transmitted or downloaded from the Slocum gliders. Both gliders had corrupted files that needed to be worked around, and in the case of the IMR glider prevented full processing of the data.
Pyglider will merge and process science and engineering data from Slocum gliders (and SeaExplorer gliders) into vertically gridded profiles with associated navigation and engineering variables. It does not, however, include correction and processing for sensors beyond a CTD. At IMR, we had not established a data processing routine for Slocum gliders prior to the cruise. Processing the data for both Slocum gliders from the cruise revealed the need to establish processing, correction and calibration routines for the non-CTD sensors on both gliders. While procedures exist for most sensors, integrating these into a processing routine is time consuming and needs more work. This was judged to be beyond the scope of this cruise report.
4.3 - Quality of the data collected with autonomous robotics compared to standard sampling
None of the data or sensors have so far been calibrated after the survey, so the quality of at least some of the data will be improved when calibration and final data processing is conducted.
Observed differences temperature and salinity between gliders and the ship’s CTD sampling likely due to differences in time and space for sampling. Quality of temperature and salinity data from gliders is generally good, and the data quality from the RBR Concerto CTD on the IMR Slocum is comparable to that of the ship’s Seabird 911 system .
The Seabird Eco-Triplets from the two gliders seem to capture the relative distribution of Chlorophyll-a concentrations relatively well. Maximum Chlorophyll-a concentrations from the two glider sensors in the surface layer agree well with concentrations from ship CTD bottle samples. There is a difference of 0.2 microg/l in maximum Chlorophyll-a concentration between the two gliders, which may be due to the lack of calibration.
The Seabird Eco-Triplets on the IMR and APN Slocum gliders also gave data on CDOM and Backscatter 700nm, but the quality of these data could not be assessed since these parameters were not sampled in situ.
The nitrate concentrations from the SUNA installed on the IMR Slocum glider had a considerable offset when compared to the bottle samples from the ship’s CTD. The likely reason is inaccuracies in the onboard optimization procedure in combination with this procedure using too high salinities near the surface. Solutions to improve this are frequent calibration (in the lab or on the ship CTD) and reprocessing of the full SUNA UV spectra using the correct salinities after the glider has been recovered.
The comparison of abundances of copepods sampled by the UVP6 and the Multinet showed that both gears revealed similar vertical distributions and abundances of calanoid copepods as well as all copepod taxa were within the same order of magnitude. This is promising for future use of the gliders and the UVP6 for zooplankton abundance estimation. However, more effort should be put into these analyses, both with respect to the location of stations and time of the day.
4.4 - Assessment of the usefulness of gliders at standard (offshore) sections
Assessing this goal is difficult as the survey was conducted in a fjord due to rough weather, and due to the short duration of the survey and deployments. We note, however, that regarding the gliders capability to follow the overall mission plan, ocean velocities in this fjord are comparable to open ocean conditions. The exception is in the Atlantic Water flow at the shelf-break (~500-700 m depth) in the Norwegian Sea, where the along-slope flow can reach almost 120 cm/s (Orvik et al., 2001). Gliders missioned to survey the repeat sections in the Norwegian Sea will have to cross this fast-moving slope current, possibly (or likely) resulting in a deviation of the mission track. On the other hand, such a deviation is less critical in the open ocean environment due to larger spatial scales of variability (Cannaby et al., 2024) compared to the confined fjord environment.
Larger sensors with increased power needs increase the size of the glider making it less manoeuvrable and less robust towards leakages. The APN Slocum glider with a UVP-6 installed was distinctly heavier and longer than the IMR Slocum, also due to the extra battery bay. This made it more prone to bending, especially during deployment and therefore leaking.
One of the goals of the survey was to assess the gain (higher resolution in space and time) and what might be lost (taxonomy, species composition) when using robotics compared to standard sampling. Addressing this, however, is not feasible due to the short duration of the deployments. Nevertheless, the short deployments from the fjord highlight the need to gain experience with using the gliders. This includes testing and developing routines for deployment/recovery of the gliders missioned for the standard (offshore) sections by using smaller boats close to the coast, as this would prevent use of research vessels for glider activity. It also includes testing the manoeuvrability of gliders with larger sensors (e.g., UVP-6) at the standard sections.
5 - Lessons learned
-
Gliders are indeed promising, but there are challenges associated with a rapid implementation of gliders in the monitoring program with the aim of reducing the ordinary surveys with research vessels.
-
These challenges include build-up of institutional competence on the new technology, but also the functionality/ease of use of the gliders.
-
Glider leakages are a concern, in particular for Slocum gliders .
-
Horses for courses: Different glider types work better for different applications. The small simple Hefring Oceanscout dealt a lot better with the strong currents in the fjord, but its small size also prevents integration of larger sensors. These can be integrated in Slocum glider, but they affect the efficiency of the glider behaviour and robustness.
-
Further work includes testing mobility at the standard sections and developing routines for deployment/recovery of gliders using smaller boats close to the coast, as this would prevent use of research vessels for glider activity.
-
Further work also includes building more experience with using gliders during longer missions.
-
The short data sets from the fjord deployments also highlight the need to develop data processing routines and tools, largely based on existing correction and processing protocols.
6 - Acknowledgement
We wish to thank the crew onboard R/V G.O. Sars for their effort to make this possible. Without them it would not be possible to conduct test campaigns like this.
7 - References
Asplin, L., Albretsen, J., Johnsen, I. A., & Sandvik, A. D. (2020). The hydrodynamic foundation for salmon lice dispersion modeling along the Norwegian coast. Ocean Dynamics, 70(8), 1151-1167. https://doi.org/10.1007/s10236-020-01378-0
Bandara, Kanchana. A brief account on the abundance and vertical distribution patterns of plankton profiled with the Underwater Vision Profiler (UVP6). Akvaplan niva
Cannaby, H., Albretsen, J., Ingvaldsen, R., Lien, V. S., & Mork, K. A. (2024). Numerical models and long term monitoring-How can numerical models be used to support in situ sampling and survey design for long term hydrographic monitoring in standard sections? (Rapport fra havforskningen, Issue 2024-18.). https://www.hi.no/hi/nettrapporter/rapport-fra-havforskningen-en-2024-18
Firing, E., Ramada, J., & Caldwell, P. (1995). Processing ADCP Data with the CODAS Software System Version 3.1. Joint Institute for Marine and Atmospheric Research University of Hawaii. Preprint at http://currents.soest.hawaii.edu/docs/adcp_doc/index.html.
Orvik, K. A., Skagseth, Ø., & Mork, M. (2001). Atlantic inflow to the Nordic Seas: current structure and volume fluxes from moored current meters, VM-ADCP and SeaSoar-CTD observations, 1995–1999. Deep Sea Research Part I: Oceanographic Research Papers, 48(4), 937-957. https://doi.org/https://doi.org/10.1016/S0967-0637(00)00038-8
Storesund, J. E., Sandaa, R.-A., Thingstad, T. F., Asplin, L., Albretsen, J., & Erga, S. R. (2017). Linking bacterial community structure to advection and environmental impact along a coast-fjord gradient of the Sognefjord, western Norway. Progress in Oceanography, 159, 13-30. https://doi.org/https://doi.org/10.1016/j.pocean.2017.09.002
8 - Appendix 1 Ocean currents from Norkyst